
Page 89 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 89
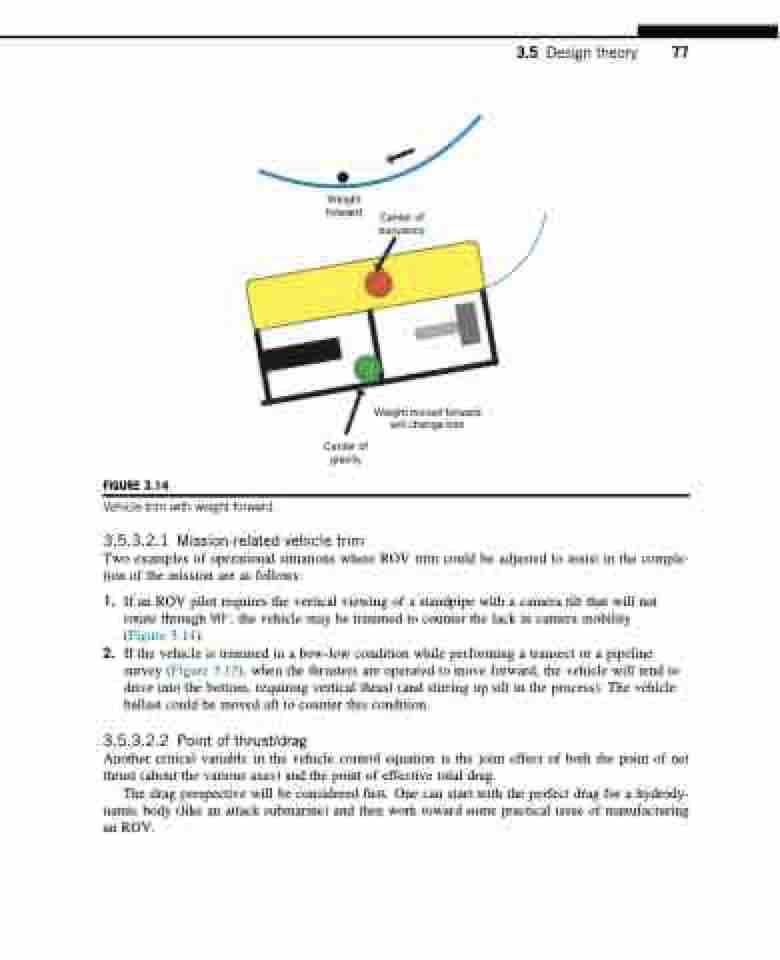
FIGURE 3.14
Vehicle trim with weight forward.
Center of gravity
3.5 Design theory 77
Weight forward
Center of buoyancy
Weight moved forward will change trim
3.5.3.2.1 Mission-related vehicle trim
Two examples of operational situations where ROV trim could be adjusted to assist in the comple- tion of the mission are as follows:
1. If an ROV pilot requires the vertical viewing of a standpipe with a camera tilt that will not
rotate through 90 , the vehicle may be trimmed to counter the lack in camera mobility
(Figure 3.14).
2. If the vehicle is trimmed in a bow-low condition while performing a transect or a pipeline
survey (Figure 3.15), when the thrusters are operated to move forward, the vehicle will tend to drive into the bottom, requiring vertical thrust (and stirring up silt in the process). The vehicle ballast could be moved aft to counter this condition.
3.5.3.2.2 Point of thrust/drag
Another critical variable in the vehicle control equation is the joint effect of both the point of net thrust (about the various axes) and the point of effective total drag.
The drag perspective will be considered first. One can start with the perfect drag for a hydrody- namic body (like an attack submarine) and then work toward some practical issue of manufacturing an ROV.
