
Page 98 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 98
86 CHAPTER 3 Design Theory and Standards
Table 3.5 Specifications of ROVs Evaluated
System and Large Small Small Large Small Medium Parameter ROV A ROV A ROV B ROV B ROV C ROV A
Depth rating (ft) Length (in.)
Width (in.)
Height (in.)
Weight in air (lb) Number of thrusters Lateral thruster Approximate thrust (lb) Tether diameter (in.) Rear camera
Side camera Generator req. (kW)
500 330 500 24 10 14 15 7 9 10 6 8 39 4 8
4 3 3 Yes No No 25 2 5 0.52 0.12 0.44 No No Yes No No No 3 1 1
1150 500 1000 39 21 18.6 18 9.65 14 18 10 14 70 24 40
4 4 4 Yes Yes Noa 23 9 12 0.65 0.30 0.35 No No No Yes No No 3 1 3
aMedium ROV A possesses lateral thrusting capabilities due to offset of vertical thrusters.
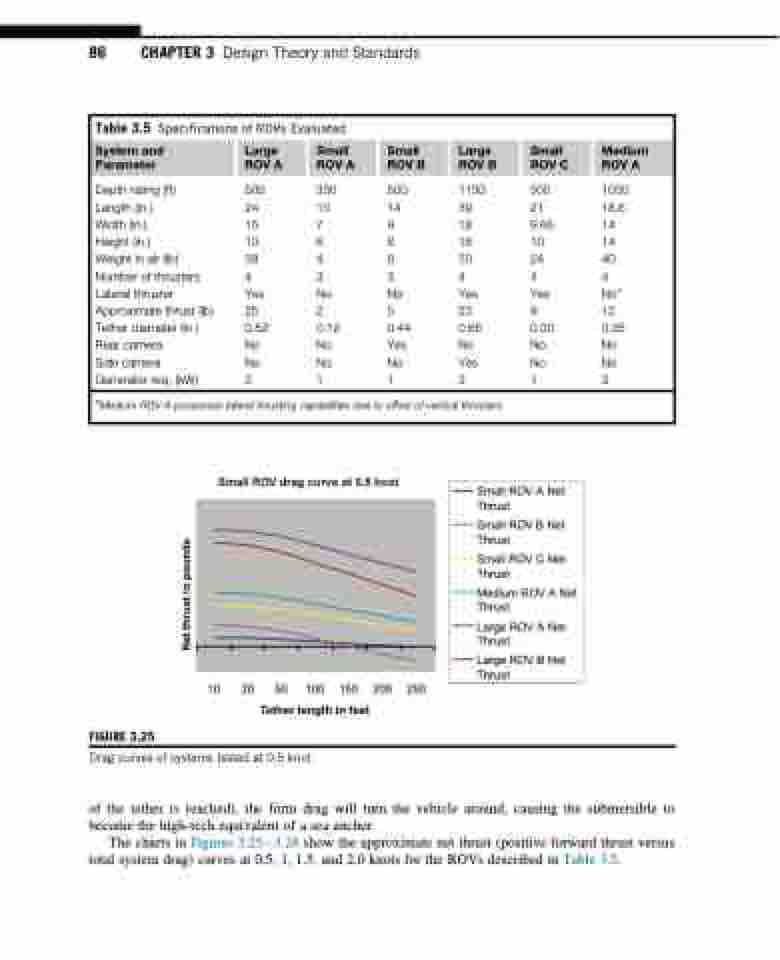
Small ROV drag curve at 0.5 knot
FIGURE 3.25
10 20 50 100 150 200 250
Tether length in feet
Small ROV A Net Thrust
Small ROV B Net Thrust
Small ROV C Net Thrust
Medium ROV A Net Thrust
Large ROV A Net Thrust
Large ROV B Net Thrust
Drag curves of systems tested at 0.5 knot.
of the tether is reached), the form drag will turn the vehicle around, causing the submersible to become the high-tech equivalent of a sea anchor.
The charts in Figures 3.253.28 show the approximate net thrust (positive forward thrust versus total system drag) curves at 0.5, 1, 1.5, and 2.0 knots for the ROVs described in Table 3.5.
Net thrust in pounds
