
Page 38 - คู่มือหลักสูตรมาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
P. 38
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
1) ระบบพิกัด
ดังที่กล่าวไปแล้วการอ้างอิงต าแหน่งจะใช้ระบบพิกัดคาร์ทีเซียน ซึ่งจะระบุพิกัดตามแนวแกน
X แกน Y และแกน Z โดยระบบพิกัดที่ส าคัญมีดังนี้
พิกัดกลาง (World coordinate system) เป็นพิกัดกลางส าหรับอ้างอิงต าแหน่ง ถ้ามี
แขนกลเพียงตัวเดียวในระบบอาจใช้พิกัดฐาน (Base coordinate) เป็นพิกัดกลางได้ แต่ถ้ามีการติดตั้ง
แขนกลหลายตัวในพื้นที่ท างานเดียวกันจะต้องก าหนดพิกัดกลางขึ้นมาเพื่อให้แขนกลแต่ละตัวอ้างอิง
พิกัดฐาน (Base coordinate system) เป็นพิกัดอ้างอิงที่ฐานยึดของแขนกล ในการ
ใช้งานแบบง่ายการเขียนโปรแกรมจะอ้างอิงโดยใช้พิกัดฐาน
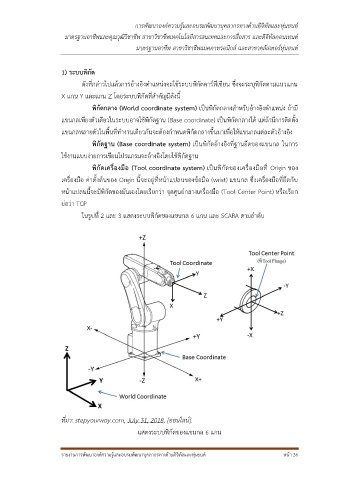
พิกัดเครื่องมือ (Tool coordinate system) เป็นพิกัดของเครื่องมือที่ Origin ของ
เครื่องมือ ค่าตั้งต้นของ Origin นี้จะอยู่ที่หน้าแปลนของข้อมือ (wrist) แขนกล ซึ่งเครื่องมือที่ยึดกับ
หน้าแปลนนี้จะมีพิกัดของมันเองโดยเรียกว่า จุดศูนย์กลางเครื่องมือ (Tool Center Point) หรือเรียก
ย่อว่า TCP
ในรูปที่ 2 และ 3 แสดงระบบพิกัดของแขนกล 6 แกน และ SCARA ตามล าดับ
ที่มา: stepyourway.com, July 31, 2018, [ออนไลน์].
แสดงระบบพิกัดของแขนกล 6 แกน
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 36