
Page 41 - คู่มือหลักสูตรมาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
P. 41
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
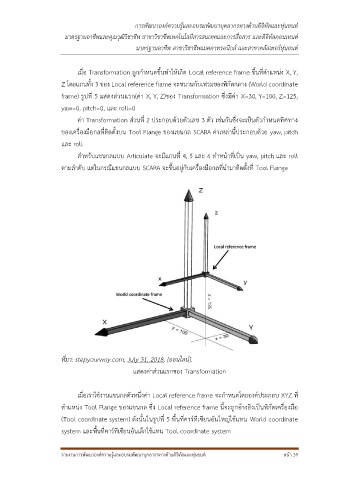
เมื่อ Transformation ถูกก าหนดขึ้นท าให้เกิด Local reference frame ขึ้นที่ต าแหน่ง X, Y,
Z โดยแกนทั้ง 3 ของ Local reference frame จะขนานกับเฟรมของพิกัดกลาง (World coordinate
frame) รูปที่ 5 แสดงส่วนแรก(ค่า X, Y, Z)ของ Transformation ซึ่งมีค่า X=30, Y=100, Z=125,
yaw=0, pitch=0, และ roll=0
ค่า Transformation ส่วนที่ 2 ประกอบด้วยตัวเลข 3 ตัว เช่นกันซึ่งจะเป็นตัวก าหนดทิศทาง
ของเครื่องมือกลที่ติดตั้งบน Tool Flange ของแขนกล SCARA ค่าเหล่านี้ประกอบด้วย yaw, pitch
และ roll
ส าหรับแขนกลแบบ Articulate จะมีแกนที่ 4, 5 และ 6 ท าหน้าที่เป็น yaw, pitch และ roll
ตามล าดับ แต่ในกรณีแขนกลแบบ SCARA จะขึ้นอยู่กับเครื่องมือกลที่น ามาติดตั้งที่ Tool Flange
ที่มา: stepyourway.com, July 31, 2018, [ออนไลน์].
แสดงค่าส่วนแรกของ Transformation
เมื่อเราใช้งานแขนกลตัวหนึ่งค่า Local reference frame จะก าหนดโดยองค์ประกอบ XYZ ที่
ต าแหน่ง Tool Flange ของแขนกล ซึ่ง Local reference frame นี้จะถูกอ้างอิงเป็นพิกัดเครื่องมือ
(Tool coordinate system) ดังนั้นในรูปที่ 5 พื้นที่คาร์ทีเซียนอันใหญ่ใช้แทน World coordinate
system และพื้นที่คาร์ทีเซียนอันเล็กใช้แทน Tool coordinate system
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 39