
Page 45 - คู่มือหลักสูตรมาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
P. 45
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
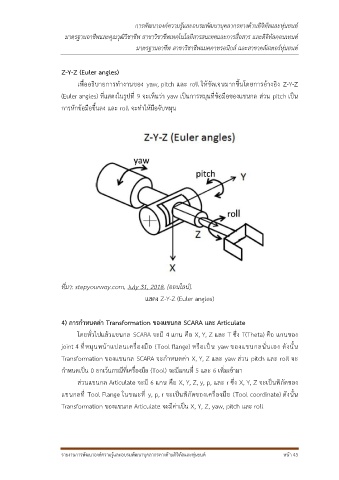
Z-Y-Z (Euler angles)
เพื่ออธิบายการท างานของ yaw, pitch และ roll ให้ชัดเจนมากขึ้นโดยการอ้างอิง Z-Y-Z
(Euler angles) ที่แสดงในรูปที่ 9 จะเห็นว่า yaw เป็นการหมุนที่ข้อมือของแขนกล ส่วน pitch เป็น
การหักข้อมือขึ้นลง และ roll จะท าให้มือจับหมุน
ที่มา: stepyourway.com, July 31, 2018, [ออนไลน์].
แสดง Z-Y-Z (Euler angles)
4) การก าหนดค่า Transformation ของแขนกล SCARA และ Articulate
โดยทั่วไปแล้วแขนกล SCARA จะมี 4 แกน คือ X, Y, Z และ T ซึ่ง T(Theta) คือ แกนของ
joint 4 ที่หมุนหน้าแปลนเครื่องมือ (Tool flange) หรือเป็น yaw ของแขนกลนั่นเอง ดังนั้น
Transformation ของแขนกล SCARA จะก าหนดค่า X, Y, Z และ yaw ส่วน pitch และ roll จะ
ก าหนดเป็น 0 ยกเว้นกรณีที่เครื่องมือ (Tool) จะมีแกนที่ 5 และ 6 เพิ่มเข้ามา
ส่วนแขนกล Articulate จะมี 6 แกน คือ X, Y, Z, y, p, และ r ซึ่ง X, Y, Z จะเป็นพิกัดของ
แขนกลที่ Tool Flange ในขณะที่ y, p, r จะเป็นพิกัดของเครื่องมือ (Tool coordinate) ดังนั้น
Transformation ของแขนกล Articulate จะมีค่าเป็น X, Y, Z, yaw, pitch และ roll
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 43