
Page 49 - คู่มือหลักสูตรมาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
P. 49
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
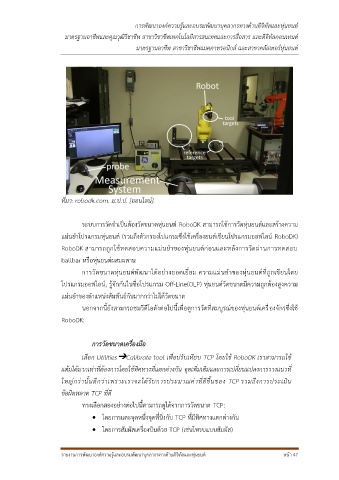
ที่มา: robodk.com. ม.ป.ป. [ออนไลน์].
ระบบการวัดจ าเป็นต้องวัดขนาดหุ่นยนต์ RoboDK สามารถใช้การวัดหุ่นยนต์และสร้างความ
แม่นย าโปรแกรมหุ่นยนต์ (รวมถึงตัวกรองโปแกรมซึ่งใช้เครื่องยนต์เขียนโปรแกรมออฟไลน์ RoboDK)
RoboDK สามารถถูกใช้ทดสอบความแม่นย าของหุ่นยนต์ก่อนและหลังการวัดผ่านการทดสอบ
ballbar หรือหุ่นยนต์ผสมผสาน
การวัดขนาดหุ่นยนต์พัฒนาได้อย่างยอดเยี่ยม ความแม่นย าของหุ่นยนต์ที่ถูกเขียนโดย
โปรแกรมออฟไลน์, รู้จักกันในชื่อโปรแกรม Off-Line(OLP) หุ่นยนต์วัดขนาดมีความถูกต้องสูงความ
แม่นย าของต าแหน่งสัมพันธ์กันมากกว่าไม่ได้วัดขนาด
นอกจากนี้ยังสามารถชมวีดีโอดังต่อไปนี้เพื่อดูการวัดที่สมบูรณ์ของหุ่นยนต์เครื่องจักรซึ่งใช้
RoboDK:
การวัดขนาดเครื่องมือ
เลือก Utilities➔Calibrate tool เพื่อปรับเทียบ TCP โดยใช้ RoboDK เราสามารถใช้
แต้มได้มากเท่าที่ต้องการโดยใช้ทิศทางที่แตกต่างกัน จุดเพิ่มเติมและการเปลี่ยนแปลงการวางแนวที่
ใหญ่กว่านั้นดีกว่าเพราะเราจะได้รับการประมาณค่าที่ดีขึ้นของ TCP รวมถึงการประเมิน
ข้อผิดพลาด TCP ที่ดี
ทางเลือกสองอย่างต่อไปนี้สามารถดูได้จากการวัดขนาด TCP:
• โดยการแตะจุดหนึ่งจุดที่นิ่งกับ TCP ที่มีทิศทางแตกต่างกัน
• โดยการสัมผัสเครื่องบินด้วย TCP (เช่นโพรบแบบสัมผัส)
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 47