
Page 51 - คู่มือหลักสูตรมาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
P. 51
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
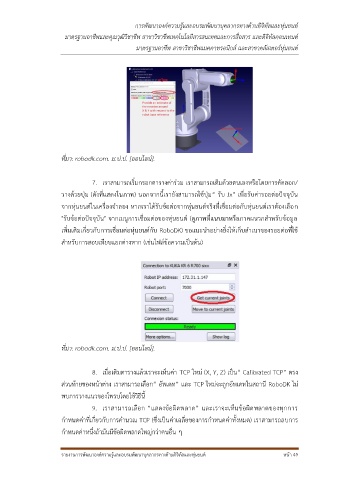
ที่มา: robodk.com. ม.ป.ป. [ออนไลน์].
7. เราสามารถเริ่มกรอกตารางค่าร่วม เราสามารถเติมด้วยตนเองหรือโดยการคัดลอก/
วางด้วยปุ่ม (ดังที่แสดงในภาพ) นอกจากนี้เรายังสามารถใช้ปุ่ม“ รับ Jx” เพื่อรับค่ารอยต่อปัจจุบัน
จากหุ่นยนต์ในเครื่องจ าลอง หากเราได้รับข้อต่อจากหุ่นยนต์จริงที่เชื่อมต่อกับหุ่นยนต์เราต้องเลือก
"รับข้อต่อปัจจุบัน" จากเมนูการเชื่อมต่อของหุ่นยนต์ (ดูภาพที่แนบมาหรือภาคผนวกส าหรับข้อมูล
เพิ่มเติมเกี่ยวกับการเชื่อมต่อหุ่นยนต์กับ RoboDK) ขอแนะน าอย่างยิ่งให้เก็บส าเนาของรอยต่อที่ใช้
ส าหรับการสอบเทียบแยกต่างหาก (เช่นไฟล์ข้อความเป็นต้น)
ที่มา: robodk.com. ม.ป.ป. [ออนไลน์].
8. เมื่อเติมตารางแล้วเราจะเห็นค่า TCP ใหม่ (X, Y, Z) เป็น“ Calibrated TCP” ตรง
ส่วนท้ายของหน้าต่าง เราสามารถเลือก“ อัพเดท” และ TCP ใหม่จะถูกอัพเดทในสถานี RoboDK ไม่
พบการวางแนวของโพรบโดยใช้วิธีนี้
9. เราสามารถเลือก “แสดงข้อผิดพลาด” และเราจะเห็นข้อผิดพลาดของทุกการ
ก าหนดค่าที่เกี่ยวกับการค านวณ TCP (ซึ่งเป็นค่าเฉลี่ยของการก าหนดค่าทั้งหมด) เราสามารถลบการ
ก าหนดค่าหนึ่งถ้ามันมีข้อผิดพลาดใหญ่กว่าคนอื่น ๆ
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 49