
Page 144 - Mechatronics with Experiments
P. 144
130 MECHATRONICS
7. GivenananalogPDcontroller,
G (s) = K + K ⋅ s (2.242)
p
c
d
(a) obtain its digital PD controller equivalent for sampling period T using all of the digital approxi-
mation methods discussed above.
(b) Let K = 1.0, K = 0.7. Plot the Bode diagrams of the analog and the digital approximations for
d
p
three different values of T = 1∕5s, 1∕50 s, 1∕500 s.
8. GivenananalogPIcontroller,
G (s) = K + K ⋅ (1∕s) (2.243)
p
i
c
(a) obtain its digital PI controller equivalent for sampling period T using all of the digital approxi-
mation methods discussed above.
(b) Let K = 1.0, K = 0.1. Plot the Bode diagrams of the analog and the digital approximations for
p i
three different values of T = 1∕5s, 1∕50 s, 1∕500 s.
9. GivenananalogPID controller,
G (s) = K + K ⋅ (1∕s) + K ⋅ s (2.244)
c
i
d
p
(a) obtain its digital PID controller equivalent for sampling period T using all of the digital approxi-
mation methods discussed above.
(b) Let K = 1.0, K = 0.1, K = 0.7. Plot the Bode diagrams of the analog and the digital approxi-
i
p
d
mations for three different values of T = 1∕5s, 1∕50 s, 1∕500 s.
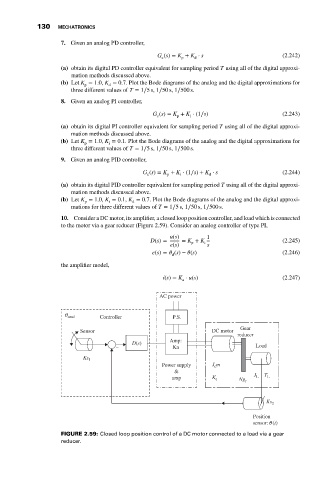
10. Consider a DC motor, its amplifier, a closed loop position controller, and load which is connected
to the motor via a gear reducer (Figure 2.59). Consider an analog controller of type PI,
u(s) 1
D(s) = = K + K i (2.245)
p
e(s) s
e(s) = (s) − (s) (2.246)
d
the amplifier model,
i(s) = K ⋅ u(s) (2.247)
a
AC power
θ cmd Controller P.S.
Gear
Sensor DC motor
reducer
Amp:
D(s)
– Ka Load
Ks 1
Power supply J m
c
&
amp K t Ng r J L T L
Ks 2
Position
sensor:θ (t)
FIGURE 2.59: Closed loop position control of a DC motor connected to a load via a gear
reducer.