
Page 139 - Mechatronics with Experiments
P. 139
CLOSED LOOP CONTROL 125
2.13 TRANSLATION OF ANALOG CONTROL TO
DIGITAL CONTROL
A controller can be completely analyzed and designed using continuous time methods. The
resultant controller is an analog controller which can also be implemented in hardware
using op-amps. The controller can be approximated with a digital controller which would
be implemented using a digital computer. The fundamental tool is the approximation of
differentiation by finite differences.
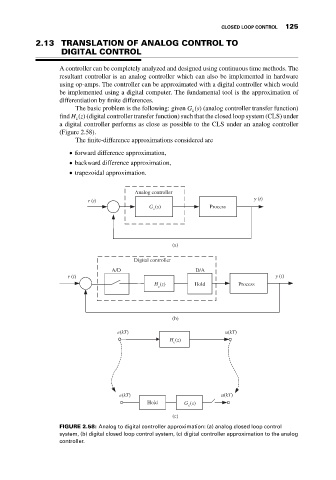
The basic problem is the following: given G (s) (analog controller transfer function)
c
find H (z) (digital controller transfer function) such that the closed loop system (CLS) under
c
a digital controller performs as close as possible to the CLS under an analog controller
(Figure 2.58).
The finite-difference approximations considered are
forward difference approximation,
backward difference approximation,
trapezoidal approximation.
Analog controller
y (t)
r (t)
G (s) Process
c
(a)
Digital controller
A/D D/A
r (t) y (t)
H (z) Hold Process
c
(b)
e(kT) u(kT)
H (z)
c
e(kT) u(kT)
Hold G (s)
c
(c)
FIGURE 2.58: Analog to digital controller approximation: (a) analog closed loop control
system, (b) digital closed loop control system, (c) digital controller approximation to the analog
controller.