
Page 53 - Mechatronics with Experiments
P. 53
Printer: Yet to Come
October 9, 2014 7:39 254mm×178mm
JWST499-c01
JWST499-Cetinkunt
INTRODUCTION 39
Pilot activates
through levers
and joysticks Mechanical links Main valve
Hydraulic actuator
(a) Mechanically control signaled, hydraulically powered
Pilot activates
through levers Main valve
Pilot - hydraulic lines
and joysticks
Pilot valves
Electro - hydraulic actuator
Mechanical sensor
mechanisms
(b) Pilot hydraulically control signaled, hydraulically powered (fly-by-hydraulics)
Pilot activates
through levers
and joysticks Main valve
Electrical wires for control signals
Flight
Sensors
Auto pilot computer
mode
Electro - hydraulic actuator
Sensors
(c) Electrically control signaled, hydraulically powered (fly-by-wire)
Pilot activates
through levers
and joysticks
Local Computer + Main valve
Two optical fibers
Flight
Sensors
Auto pilot computer
mode
Smart actuator
Sensors
(d) Optically or electrically control signaled, electrically powered (Fly-by-light)
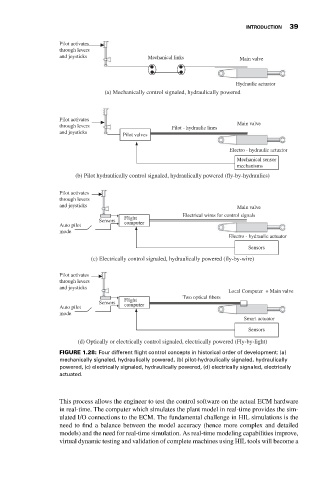
FIGURE 1.28: Four different flight control concepts in historical order of development: (a)
mechanically signaled, hydraulically powered, (b) pilot-hydraulically signaled, hydraulically
powered, (c) electrically signaled, hydraulically powered, (d) electrically signaled, electrically
actuated.
This process allows the engineer to test the control software on the actual ECM hardware
in real-time. The computer which simulates the plant model in real-time provides the sim-
ulated I/O connections to the ECM. The fundamental challenge in HIL simulations is the
need to find a balance between the model accuracy (hence more complex and detailed
models) and the need for real-time simulation. As real-time modeling capabilities improve,
virtual dynamic testing and validation of complete machines using HIL tools will become a