
Page 735 - Mechatronics with Experiments
P. 735
PROGRAMMABLE MOTION CONTROL SYSTEMS 721
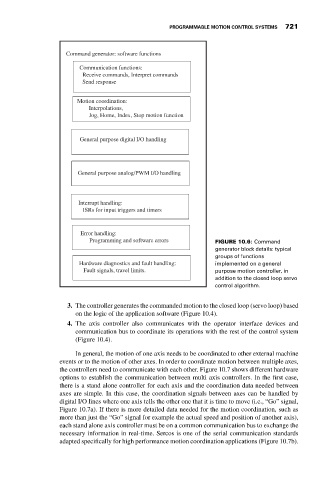
Command generator: software functions
Communication functions:
Receive commands, Interpret commands
Send response
Motion coordination:
Interpolations,
Jog, Home, Index, Stop motion function
General purpose digital I/O handling
General purpose analog/PWM I/O handling
Interrupt handling:
ISRs for input triggers and timers
Error handling:
Programming and software errors FIGURE 10.6: Command
generator block details: typical
groups of functions
Hardware diagnostics and fault handling: implemented on a general
Fault signals, travel limits. purpose motion controller, in
addition to the closed loop servo
control algorithm.
3. The controller generates the commanded motion to the closed loop (servo loop) based
on the logic of the application software (Figure 10.4).
4. The axis controller also communicates with the operator interface devices and
communication bus to coordinate its operations with the rest of the control system
(Figure 10.4).
In general, the motion of one axis needs to be coordinated to other external machine
events or to the motion of other axes. In order to coordinate motion between multiple axes,
the controllers need to communicate with each other. Figure 10.7 shows different hardware
options to establish the communication between multi axis controllers. In the first case,
there is a stand alone controller for each axis and the coordination data needed between
axes are simple. In this case, the coordination signals between axes can be handled by
digital I/O lines where one axis tells the other one that it is time to move (i.e., “Go” signal,
Figure 10.7a). If there is more detailed data needed for the motion coordination, such as
more than just the “Go” signal for example the actual speed and position of another axis),
each stand alone axis controller must be on a common communication bus to exchange the
necessary information in real-time. Sercos is one of the serial communication standards
adapted specifically for high performance motion coordination applications (Figure 10.7b).