
Page 741 - Mechatronics with Experiments
P. 741
PROGRAMMABLE MOTION CONTROL SYSTEMS 727
.
θ
θ
.
θ run
.. ..
θ a θ d
1 1
Time
t t t
acc run dec
. Compound index
θ
1
.
θ
2
Time
θ θ
1 2
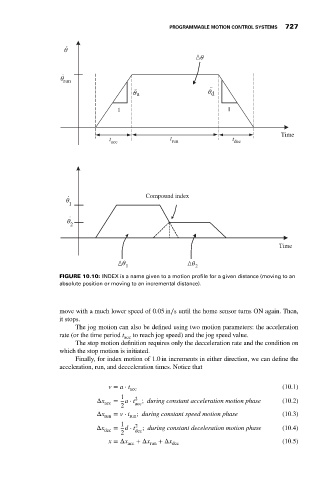
FIGURE 10.10: INDEX is a name given to a motion profile for a given distance (moving to an
absolute position or moving to an incremental distance).
move with a much lower speed of 0.05 in∕s until the home sensor turns ON again. Then,
it stops.
The jog motion can also be defined using two motion parameters: the acceleration
rate (or the time period t acc to reach jog speed) and the jog speed value.
The stop motion definition requires only the decceleration rate and the condition on
which the stop motion is initiated.
Finally, for index motion of 1.0 in increments in either direction, we can define the
acceleration, run, and decceleration times. Notice that
v = a ⋅ t (10.1)
acc
1 2
Δx = a ⋅ t ; during constant acceleration motion phase (10.2)
acc acc
2
Δx run = v ⋅ t run ; during constant speed motion phase (10.3)
1 2
Δx dec = d ⋅ t ; during constant deceleration motion phase (10.4)
2 dec
x =Δx acc +Δx run +Δx dec (10.5)