
Page 285 - Kuşların ve Uçuşun Kökeni
P. 285
Bir böcek uçarken, sa-
niyede ortalama birkaç
yüz defa kanat ç›rpar.
Bir saniyede bu kadar
hareketin ola¤anüstü
bir hassasl›kla gerçek-
lefltirilmesi, bu tasar›-
m›n teknolojik olarak
taklit edilmesini imkan-
s›z k›lmaktad›r.
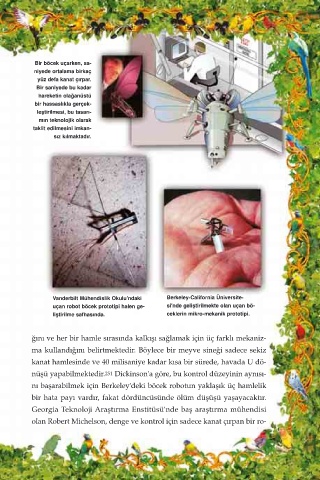
Vanderbilt Mühendislik Okulu'ndaki Berkeley-California Üniversite-
uçan robot böcek prototipi halen ge- si'nde gelifltirilmekte olan uçan bö-
lifltirilme safhas›nda. ceklerin mikro-mekanik prototipi.
¤›n› ve her bir hamle s›ras›nda kalk›fl› sa¤lamak için üç farkl› mekaniz-
ma kulland›¤›n› belirtmektedir. Böylece bir meyve sine¤i sadece sekiz
kanat hamlesinde ve 40 milisaniye kadar k›sa bir sürede, havada U dö-
nüflü yapabilmektedir. 251 Dickinson'a göre, bu kontrol düzeyinin ayn›s›-
n› baflarabilmek için Berkeley'deki böcek robotun yaklafl›k üç hamlelik
bir hata pay› vard›r, fakat dördüncüsünde ölüm düflüflü yaflayacakt›r.
Georgia Teknoloji Araflt›rma Enstitüsü'nde bafl araflt›rma mühendisi
olan Robert Michelson, denge ve kontrol için sadece kanat ç›rpan bir ro-