
Page 60 - Instrumentation and Measurement
P. 60
Because the rate of change of the error with time is constant, the derivative controller gives a constant
controller output signal to the correction element. With derivative control, as soon as the error signal
begins to change there can be quite a large controller output since it is proportional to the rate of
change of the error signal and not its value. Thus, with this form of control there can be rapid
corrective responses to error signals that occur.
4.5.1 PD Control
Derivative controllers give responses to changing error signals but do not, however, respond to
constant error signals, since with a constant error the rate of change of error with time is zero. Because
of this, derivative control D is combined with proportional control P. Then:
PD controller output = Kp x error + Kd x rate of change of error with time
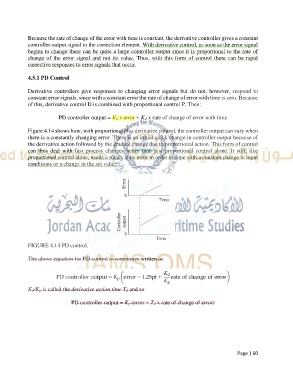
Figure 4.14 shows how, with proportional plus derivative control, the controller output can vary when
there is a constantly changing error. There is an initial quick change in controller output because of
the derivative action followed by the gradual change due to proportional action. This form of control
can thus deal with fast process changes better than just proportional control alone. It still, like
proportional control alone, needs a steady state error in order to cope with a constant change in input
conditions or a change in the set value.
FIGURE 4.14 PD control.
The above equation for PD control is sometimes written as
Kd/Kp is called the derivative action time Td and so
PD controller output = Kp (error + Td x rate of change of error)
Page | 60