
Page 62 - Instrumentation and Measurement
P. 62
controller output = 4 x 4% = 16%
The error is still changing and so there will still be an output due to the derivative mode. This will be
given by
and so controller output = KpTd x rate of change of error
controller output = 4 x 0.4 x 2% = 3.2%
Hence the total controller output due to both modes is the sum of these two outputs and 16% +
3.2% = 19.2%.
4.6 Integral Control
Integral control is the control mode where the controller output is proportional to the integral of the
error with respect to time, i.e.
controller output α integral of error with time
and so, we can write
I controller output = Ki x integral of error with time
where Ki is the constant of proportionality and, when the controller output is expressed as a
percentage and the error as a percentage, has units of s-1.
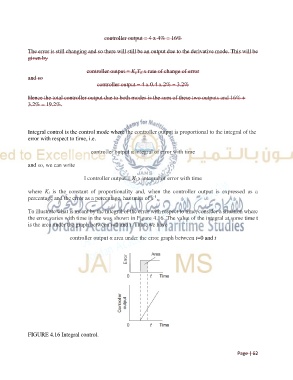
To illustrate what is meant by the integral of the error with respect to time, consider a situation where
the error varies with time in the way shown in Figure 4.16. The value of the integral at some time t
is the area under the graph between t=0 and t. Thus, we have
controller output α area under the error graph between t=0 and t
FIGURE 4.16 Integral control.
Page | 62