
Page 52 - คู่มือหลักสูตรสาขาวิชาแมคคาทรอนิกส์ และคลัสเตอร์หุ่นยนต์
P. 52
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
ขอแนะน าให้ท าการปรับเทียบโดยการแตะที่การอ้างอิงระนาบหากเราจ าเป็นต้องปรับเทียบ
โพรบแบบสัมผัสหรือแกนหมุน วิธีนี้มีเสถียรภาพมากขึ้นต่อข้อผิดพลาดของผู้ใช้
หาก TCP เป็นทรงกลมศูนย์กลางของทรงกลมจะถูกค านวณเป็น TCP ใหม่ (ไม่จ าเป็นต้อง
ระบุขนาดเส้นผ่าศูนย์กลางทรงกลม)
ที่มา: robodk.com. ม.ป.ป. [ออนไลน์].
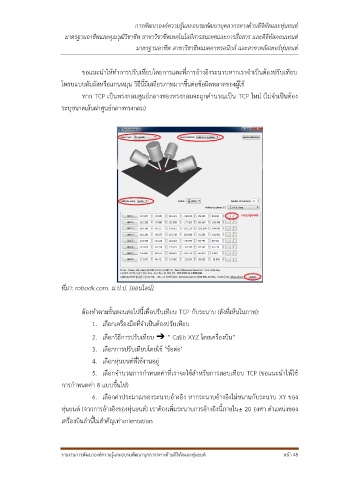
ต้องท าตามขั้นตอนต่อไปนี้เพื่อปรับเทียบ TCP กับระนาบ (ดังที่เห็นในภาพ):
1. เลือกเครื่องมือที่จ าเป็นต้องปรับเทียบ
2. เลือกวิธีการปรับเทียบ ➔ ” Calib XYZ โดยเครื่องบิน”
3. เลือกการปรับเทียบโดยใช้ "ข้อต่อ"
4. เลือกหุ่นยนต์ที่ใช้งานอยู่
5. เลือกจ านวนการก าหนดค่าที่เราจะใช้ส าหรับการสอบเทียบ TCP (ขอแนะน าให้ใช้
การก าหนดค่า 8 แบบขึ้นไป)
6. เลือกค่าประมาณของระนาบอ้างอิง หากระนาบอ้างอิงไม่ขนานกับระนาบ XY ของ
หุ่นยนต์ (จากการอ้างอิงของหุ่นยนต์) เราต้องเพิ่มระนาบการอ้างอิงนี้ภายใน± 20 องศา ต าแหน่งของ
เครื่องบินล านี้ไม่ส าคัญเท่าorientation
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 48