
Page 26 - DEBERES Y CONSULTAS
P. 26
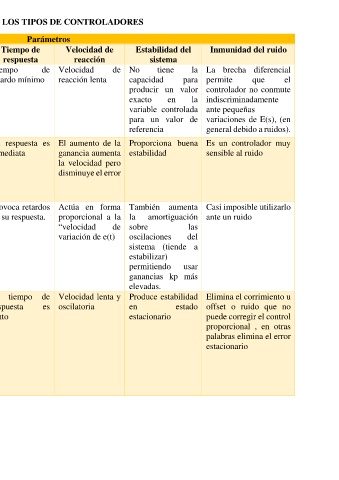
TABLA DE RESUMEN DE LOS TIPOS DE CONTROLADORES
Tipo de Parámetros
controlador Gráfica Tiempo de Velocidad de Estabilidad del Inmunidad del ruido
respuesta reacción sistema
ON-OFF Tiempo de Velocidad de No tiene la La brecha diferencial
retardo mínimo reacción lenta capacidad para permite que el
producir un valor controlador no conmute
exacto en la indiscriminadamente
variable controlada ante pequeñas
para un valor de variaciones de E(s), (en
referencia general debido a ruidos).
Proporcional Su respuesta es El aumento de la Proporciona buena Es un controlador muy
(P) inmediata ganancia aumenta estabilidad sensible al ruido
la velocidad pero
disminuye el error
Derivativo Provoca retardos Actúa en forma También aumenta Casi imposible utilizarlo
(D) en su respuesta. proporcional a la la amortiguación ante un ruido
“velocidad de sobre las
variación de e(t) oscilaciones del
sistema (tiende a
estabilizar)
permitiendo usar
ganancias kp más
elevadas.
Integrativo El tiempo de Velocidad lenta y Produce estabilidad Elimina el corrimiento u
(I) respuesta es oscilatoria en estado offset o ruido que no
lento estacionario puede corregir el control
proporcional , en otras
palabras elimina el error
estacionario