
Page 42 - E-MODUL MODEL CINQASE DINAMIKA ROTASI DAN KESEIMBANAGN BENDA TEGAR
P. 42
E-Modul Fisika Model CinQASE
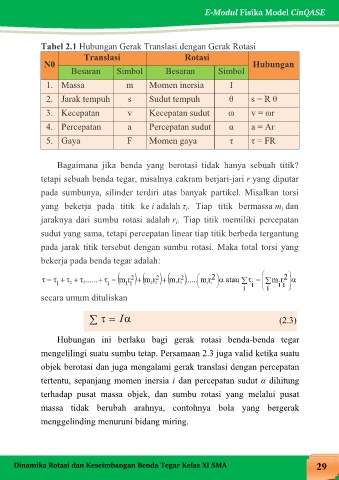
Tabel 2.1 Hubungan Gerak Translasi dengan Gerak Rotasi
Translasi Rotasi
N0 Hubungan
Besaran Simbol Besaran Simbol
1. Massa m Momen inersia I
2. Jarak tempuh s Sudut tempuh θ s = R θ
3. Kecepatan v Kecepatan sudut ω v = ωr
4. Percepatan a Percepatan sudut α a = Αr
5. Gaya F Momen gaya τ τ = FR
Bagaimana jika benda yang berotasi tidak hanya sebuah titik?
tetapi sebuah benda tegar, misalnya cakram berjari-jari r yang diputar
pada sumbunya, silinder terdiri atas banyak partikel. Misalkan torsi
yang bekerja pada titik ke i adalah τ . Tiap titik bermassa m dan
i
i
jaraknya dari sumbu rotasi adalah r . Tiap titik memiliki percepatan
i
sudut yang sama, tetapi percepatan linear tiap titik berbeda tergantung
pada jarak titik tersebut dengan sumbu rotasi. Maka total torsi yang
bekerja pada benda tegar adalah:
...... rm 2 m r 2 m r 2 ...... r 2 atau m r 2
m
1 2 3 i 1 1 2 2 3 3 i i i i i
i i
secara umum dituliskan
I (2.3)
Hubungan ini berlaku bagi gerak rotasi benda-benda tegar
mengelilingi suatu sumbu tetap. Persamaan 2.3 juga valid ketika suatu
objek berotasi dan juga mengalami gerak translasi dengan percepatan
tertentu, sepanjang momen inersia i dan percepatan sudut α dihitung
terhadap pusat massa objek, dan sumbu rotasi yang melalui pusat
massa tidak berubah arahnya, contohnya bola yang bergerak
menggelinding menuruni bidang miring.
Dinamika Rotasi dan Keseimbangan Benda Tegar Kelas XI SMA 29