
Page 107 - การสำรวจภาพถ่าย Photogrammetry
P. 107
77
ลําตัวยก (Lifting Body) ซึ่งไมมีปก แมวามันอาจจะมีพื้นผิวกันโคลงและการควบคุมขนาดเล็ก ในการบินในอากาศของ เครื่องบิน จะมีแรงหลักอยางนอย 4 แรงเกิดขึ้นเสมอ ไดแก
(1) แรงยก (Lift) เครื่องบินสามารถลอยอยูในอากาศได เนื่องมาจากแรงยกที่เกิดขึ้นที่ปก ซึ่งแรงยกนี้ จะเกิดขณะที่ เครื่องบินมีการเคลื่อนที่ผานอากาศหรือมองในมุมกลับคือ มีอากาศเคลื่อนที่ผานปกดวยความเร็วที่เหมาะสมจะ เกิดแรงยกที่เพียงพอจะยกเครื่องบินใหลอยขึ้นได
(2) แรงตาน (Drag) แรงตานคือแรงที่เกิดขึ้นขณะเครื่องบินมีการเคลื่อนที่ผานอากาศ ตัวแปรหลักของแรงตานคือ ขนาดรูปทรงของเครื่องบินและความเร็วขณะเคลื่อนที่
(3) น้ําหนัก (Weight) น้ําหนักรวมของเครื่องบิน
(4) แรงขับดัน (Thrust) แรงที่ขับดันหรือผลัก ฉุด เครื่องบินใหเคลื่อนที่ไปขางหนามีแหลงกําเนิดมาจากเครื่องยนต
ชนิดตาง ๆ
(ก) (ข)
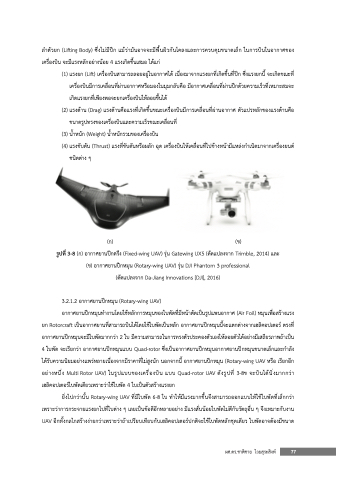
รูปที่ 3-8 (ก) อากาศยานปกตรึง (Fixed-wing UAV) รุน Gatewing UX5 (ดัดแปลงจาก Trimble, 2014) และ
(ข) อากาศยานปกหมุน (Rotary-wing UAV) รุน DJI Phantom 3 professional (ดัดแปลงจาก Da-Jiang Innovations [DJI], 2016)
3.2.1.2 อากาศยานปกหมุน (Rotary-wing UAV)
อากาศยานปกหมุนทํางานโดยใชหลักการหมุนของใบพัดที่มีหนาตัดเปนรูปแพนอากาศ (Air Foil) หมุนเพื่อสรางแรง ยก Rotorcraft เปนอากาศยานที่สามารถบินไดโดยใชใบพัดเปนหลัก อากาศยานปกหมุนนี้จะแตกตางจากเฮลิคอปเตอร ตรงที่ อากาศยานปกหมุนจะมีใบพัดมากกวา2ใบมีความสามารถในการทรงตัวประคองตัวเองใหลอยตัวไดอยางมีเสถียรภาพถาเปน 4 ใบพัด จะเรียกวา อากาศยานปกหมุนแบบ Quad-rotor ซึ่งเปนอากาศยานปกหมุนอากาศยานปกหมุนขนาดเล็กและกําลัง ไดรับความนิยมอยางแพรหลายเนื่องจากมีราคาที่ไมสูงนัก นอกจากนี้ อากาศยานปกหมุน (Rotary-wing UAV หรือ เรียกอีก อยางหนึ่ง Multi Rotor UAV) ในรูปแบบของเครื่องบิน แบบ Quad-rotor UAV ดังรูปที่ 3-8ข จะบินไดนิ่งมากกวา เฮลิคอปเตอรใบพัดเดียวเพราะวาใชใบพัด 4 ใบเปนตัวสรางแรงยก
ยิ่งไปกวานั้น Rotary-wing UAV ที่มีใบพัด 6-8 ใบ ทําใหมีแรงมากขึ้นจึงสามารถออกแบบใหใชใบพัดที่เล็กกวา เพราะวาการกระจายแรงยกไปที่ใบตาง ๆ เลยเปนขอดีอีกหลายอยาง มีแรงสั่นนอยใบพัดไมตีกับวัตถุอื่น ๆ จึงเหมาะกับงาน UAV อีกทั้งกลไกสรางงายกวาเพราะวาถาเปรียบเทียบกับเฮลิคอปเตอรปกติจะใชใบพัดหลักชุดเดียว ใบพัดอาจตองมีขนาด
ผศ.ดร.ชาติิชาย ไวยสุุระสุิงห์์
77
