
Page 142 - การสำรวจภาพถ่าย Photogrammetry
P. 142
112
112
4.3.3.2 การรังวัดพิกัดภาคพื้นดินที่เหมาะสมสําหรับการสํารวจดวยภาพระยะใกล
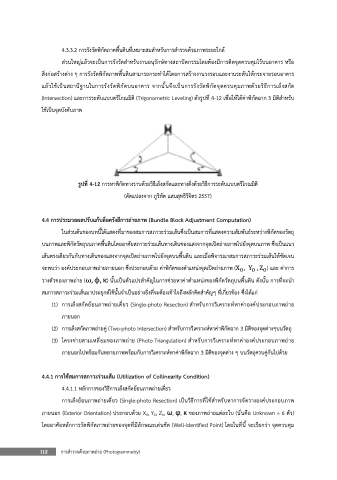
สวนใหญแลวจะเปนการรังวัดสําหรับงานอนุรักษทางสถาปตกรรมโดยตองมีการติดจุดควบคุมไวบนอาคาร หรือ สิ่งกอสรางตาง ๆ การรังวัดพิกัดภาพพื้นดินสามารถกระทําไดโดยการสรางงานวงรอบและงานระดับใหกระจายรอบอาคาร แลวใชเปนสถานีฐานในการรังวัดพิกัดบนอาคาร จากนั้นจึงเปนการรังวัดพิกัดจุดควบคุมภาพดวยวิธีการเล็งสกัด (Intersection) และการระดับแบบตรีโกณมิติ (Trigonometric Leveling) ดังรูปที่ 4-12 เพื่อใหไดคาพิกัดฉาก 3 มิติสําหรับ ใชเปนจุดบังคับภาพ
รูปที่ 4-12 การหาพิกัดทางราบดวยวิธีเล็งสกัดและทางดิ่งดวยวิธีการระดับแบบตรีโกณมิติ (ดัดแปลงจาก ภูริทัต แสนสุทธิวิจิตร 2557)
4.4 การประมวลผลปรับแกบล็อครังสีการถายภาพ (Bundle Block Adjustment Computation)
ในสวนตนของบทนี้ไดแสดงที่มาของสมการสภาวะรวมเสนซึ่งเปนสมการที่แสดงความสัมพันธระหวางพิกัดของวัตถุ บนภาพและพิกัดวัตถุบนภาคพื้นดินโดยอาศัยสภาวะรวมเสนทางเดินของแสงจากจุดเปดถายภาพไปยังจุดบนภาพ ซึ่งเปนแนว เสนตรงเดียวกันกับทางเดินของแสงจากจุดเปดถายภาพไปยังจุดบนพื้นดิน และเมื่อพิจารณาสมการสภาวะรวมเสนใหชัดเจน จะพบวา องคประกอบภาพถายภายนอก ซึ่งประกอบดวย คาพิกัดของตําแหนงจุดเปดถายภาพ (X, Y , Z) และ คาการ วางตัวของภาพถาย (ω, φ, κ) นั้นเปนตัวแปรสําคัญในการชวยหาคาตําแหนงของพิกัดวัตถุบนพื้นดิน ดังนั้น การที่จะนํา สมการสภาวะรวมเสนมาประยุกตใชนั้นจําเปนอยางยิ่งที่จะตองเขาใจถึงหลักคิดสําคัญๆ ที่เกี่ยวของ ซึ่งไดแก
(1) การเล็งสกัดยอนภาพถายเดี่ยว(Single-photoResection)สําหรับการวิเคราะหหาคาองคประกอบภาพถาย ภายนอก
(2) การเล็งสกัดภาพถายคู(Two-photoIntersection)สําหรับการวิเคราะหหาคาพิกัดฉาก3มิติของจุดตางๆบนวัตถุ
(3) โครงขายสามเหลี่ยมของภาพถาย (Photo Triangulation) สําหรับการวิเคราะหหาคาองคประกอบภาพถาย
ภายนอกไปพรอมกันหลายภาพพรอมกับการวิเคราะหหาคาพิกัดฉาก 3 มิติของจุดตาง ๆ บนวัตถุควบคูกันไปดวย
4.4.1 การใชสมการสภาวะรวมเสน (Utilization of Collinearity Condition)
4.4.1.1 หลักการของวิธีการเล็งสกัดยอนภาพถายเดี่ยว
การเล็งยอนภาพถายเดี่ยว (Single-photo Resection) เปนวิธีการที่ใชสําหรับหาการจัดวางองคประกอบภาพ ภายนอก (Exterior Orientation) ประกอบดวย X0, Y0, Z0, ω, φ, κ ของภาพถายแตละใบ (นั่นคือ Unknown = 6 ตัว) โดยอาศัยหลักการวัดพิกัดภาพถายของจุดที่มีลักษณะเดนชัด (Well-identified Point) โดยในที่นี้ จะเรียกวา จุดควบคุม
การสำาํา รวจด้้วยภาพถ่่าย (Photogrammetry)
