
Page 269 - การสำรวจภาพถ่าย Photogrammetry
P. 269
239
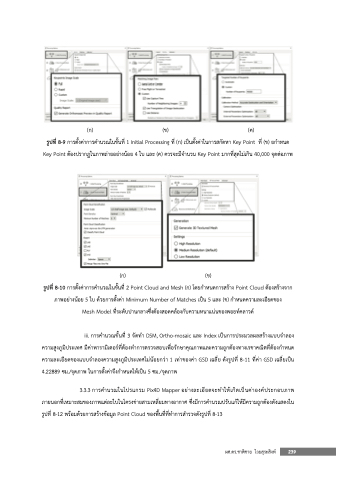
(ก) (ข) (ค)
รูปที่ 8-9 การตั้งคาการคํานวณในขั้นที่ 1 Initial Processing ที่ (ก) เปนตั้งคาในการสกัดหา Key Point ที่ (ข) ยกําหนด
Key Point ตองปรากฏในภาพถายอยางนอย 4 ใบ และ (ค) ควรจะมีจํานวน Key Point มากที่สุดไมเกิน 40,000 จุดตอภาพ
(ก) (ข)
รูปที่ 8-10 การตั้งคาการคํานวณในขั้นที่ 2 Point Cloud and Mesh (ก) โดยกําหนดการสราง Point Cloud ตองสรางจาก
ภาพอยางนอย 5 ใบ ดวยการตั้งคา Minimum Number of Matches เปน 5 และ (ข) กําหนดความละเอียดของ Mesh Model ที่ระดับปานกลางซึ่งตองสอดคลองกับความหนาแนนของพอยทคลาวด
iii. การคํานวณขั้นที่ 3 จัดทํา DSM, Ortho-mosaic และ Index เปนการประมวลผลสรางแบบจําลอง ความสูงภูมิประเทศ มีคาพารามิเตอรที่ตองทําการตรวจสอบเพื่อรักษาคุณภาพและความถูกตองทางเรขาคณิตที่ตองกําหนด ความละเอียดของแบบจําลองความสูงภูมิประเทศไมนอยกวา 1 เทาของคา GSD เฉลี่ย ดังรูปที่ 8-11 ที่คา GSD เฉลี่ยเปน 4.22889 ซม./จุดภาพ ในการตั้งคาจึงกําหนดใหเปน 5 ซม./จุดภาพ
3.3.3 การคํานวณในโปรแกรม Pix4D Mapper อยางละเอียดจะทําใหเกิดเปนคาองคประกอบภาพ ภายนอกที่เหมาะสมของภาพแตละใบในโครงขายสามเหลี่ยมทางอากาศ ซึ่งมีการคํานวณปรับแกใหมีความถูกตองดังแสดงใน รูปที่ 8-12 พรอมดวยการสรางขอมูล Point Cloud ของพื้นที่ที่ทําการสํารวจดังรูปที่ 8-13
ผศ.ดร.ชาติิชาย ไวยสุุระสุิงห์์
239
