
Page 108 - eProceeding for IRSTC2017 and RESPeX2017
P. 108
Anwar / JOJAPS – JOURNAL ONLINE JARINGAN COT POLIPD
Flowchart Sistem Pesawat
Mulai
Inisialisasi I/O
mikrokontroller
Tidak
Deteksi MPU 6050 HMCL
8533L, BMP 180 3Or
433mhz, GPS
Tidak
Deteksi apakah ada
karakter’c’ dikirim ke arduino
Ya
Data sensor
Membaca
dikirim ke
adanya char’d’ transmitter 3Dr 43
dikirim
mhz
Tidak
Tidak Baca data receiver
trinigy dari
transmitter
Tidak
Data terbaca
>0
Ya
Apakah Tidak
Apakah ch3 Apakah ch2 Apakah ch2
ch1bernilai
bernilai antara antara 900- bernilai antara bernilai antara
900-1800 900-1800 900-1800
1800
Ya Ya Ya Ya
Tidak Tidak
Pengaturan Pengaturan Apakah ch2 Apakah ch2
kecepatan motor gerakan sirip yaw bernilai antara bernilai antara
brushless pesawat rudder pesawat 1400-1500 1400-1500
Ya
Ya Ya Ya
Apakah Apakah
variable Gyx≠0 variable Gyy≠0
Tidak
Kontrol Kontrol pitch
penstabilan untuk Kontrol
menggunakan Kontrol penstabilan pitch
sistem kendali pesawat menggunakan
PID PID pesawat
Selesai
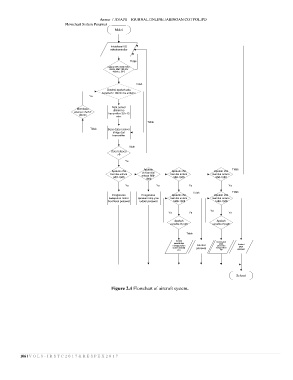
Figure 2.4 Flowchart of aircraft system.
106 | V O L 8 - I R S T C 2 0 1 7 & R E S P E X 2 0 1 7