
Page 113 - คู่มือหลักสูตรการพัฒนาสื่อการเรียนดิจิทัลด้วยระบบ VR AR และ MR
P. 113
เนื้อหาโครงสร้างหลักสูตรการฝึกทักษะการพัฒนาคอนเทนต์หลักสูตรฝึกอบรมด้วย VR AR และ MR
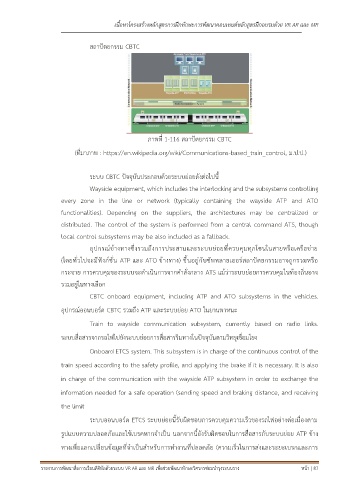
สถาปัตยกรรม CBTC
ภาพที่ 1-116 สถาปัตยกรรม CBTC
(ที่มาภาพ : https://en.wikipedia.org/wiki/Communications-based_train_control, ม.ป.ป.)
ระบบ CBTC ปัจจุบันประกอบด้วยระบบย่อยดังต่อไปนี้
Wayside equipment, which includes the interlocking and the subsystems controlling
every zone in the line or network (typically containing the wayside ATP and ATO
functionalities). Depending on the suppliers, the architectures may be centralized or
distributed. The control of the system is performed from a central command ATS, though
local control subsystems may be also included as a fallback.
อุปกรณ์ข้างทางซึ่งรวมถึงการประสานและระบบย่อยที่ควบคุมทุกโซนในสายหรือเครือข่าย
(โดยทั่วไปจะมีฟังก์ชั่น ATP และ ATO ข้างทาง) ขึ้นอยู่กับซัพพลายเออร์สถาปัตยกรรมอาจถูกรวมหรือ
กระจาย การควบคุมของระบบจะดำเนินการจากคำสั่งกลาง ATS แม้ว่าระบบย่อยการควบคุมในท้องถิ่นอาจ
รวมอยู่ในทางเลือก
CBTC onboard equipment, including ATP and ATO subsystems in the vehicles.
อุปกรณ์ออนบอร์ด CBTC รวมถึง ATP และระบบย่อย ATO ในยานพาหนะ
Train to wayside communication subsystem, currently based on radio links.
ระบบสื่อสารจากรถไฟไปยังระบบย่อยการสื่อสารริมทางในปัจจุบันตามวิทยุเชื่อมโยง
Onboard ETCS system. This subsystem is in charge of the continuous control of the
train speed according to the safety profile, and applying the brake if it is necessary. It is also
in charge of the communication with the wayside ATP subsystem in order to exchange the
information needed for a safe operation (sending speed and braking distance, and receiving
the limit
ระบบออนบอร์ด ETCS ระบบย่อยนี้รับผิดชอบการควบคุมความเร็วของรถไฟอย่างต่อเนื่องตาม
รูปแบบความปลอดภัยและใช้เบรคหากจำเป็น นอกจากนี้ยังรับผิดชอบในการสื่อสารกับระบบย่อย ATP ข้าง
ทางเพื่อแลกเปลี่ยนข้อมูลที่จำเป็นสำหรับการทำงานที่ปลอดภัย (ความเร็วในการส่งและระยะเบรกและการ
รายงานการพัฒนาสื่อการเรียนดิจิทัลด้วยระบบ VR AR และ MR เพื่อช่วยพัฒนาทักษะวิศวกรซ่อมบ ารุงระบบราง หน้า | 87