
Page 23 - sadasd
P. 23
1. เริ่มเดินมอเตอร์ ด้วยการต่อโดยตรงกับแหล่งจ่าย (Direct on Line Starter; DOL) การเริ่ม
เดินแบบนี้ แรงบิดเริ่มเดิน (Starting Torque) จะสูงประมาณ 1.5 เท่า ของแรงบิดตามพิกัด แต่กระแสเริ่ม
เดิน (Starting Current) จะสูงประมาณ 4 – 8 เท่าของพิกัด จึงเหมาะส าหรับการเริ่มเดินมอเตอร์ขนาดเล็กไม่
เกิน 7.5 แรงม้า (Horse Power; HP) เนื่องจากกระแสเกินแรงดันจะท าให้ไฟตกไฟกระพริบขณะเริ่มเดิน
มอเตอร์
้
2. เริ่มเดินมอเตอร์ด้วยกำรลดแรงดันไฟฟำ (Reduced Voltage Starter) การเริ่มเดินด้วย
การลดแรงดันไฟฟ้าให้ต่ าลง จะท าให้กระแสเริ่มเดินลดลง แต่แรงบิดจะลดลงเช่นกัน การเริ่มเดินแบบนนี้ท าได้
หลายวิธี ได้แก่
- การเริ่มเดินแบบสตาร์-เดลต้า (Star – Delta Starter)
- การเริ่มเดินด้วยออโต้ทรานสฟอร์เมอร์ (Auto Transformer Starter)
- การเริ่มเดินด้วยความต้านทาน (Resistance Starter)
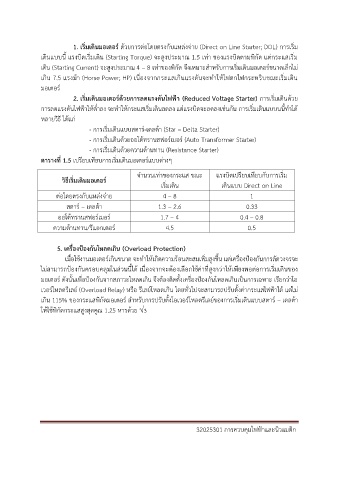
ตำรำงที่ 1.5 เปรียบเทียบการเริ่มเดินมอเตอร์แบบต่างๆ
จ านวนเท่าของกระแส ขณะ แรงบิดเปรียบเทียบกับการเริ่ม
วิธีเริ่มเดินมอเตอร์
เริ่มเดิน เดินแบบ Direct on Line
ต่อโดยตรงกับแหล่งจ่าย 4 – 8 1
สตาร์ – เดลต้า 1.3 – 2.6 0.33
ออโต้ทรานสฟอร์เมอร์ 1.7 – 4 0.4 – 0.8
ความต้านทาน/รีแอกเตอร์ 4.5 0.5
5. เครื่องป้องกันโหลดเกิน (Overload Protection)
เมื่อใช้งานมอเตอร์เกินขนาด จะท าให้เกิดความร้อนสะสมเพิ่มสูงขึ้น แต่เครื่องป้องกันการลัดวงจรจะ
้
ไม่สามารถป้องกันครอบคลุมในส่วนนี้ได้ เนื่องจากจะต้องเลือกใชคาที่สูงกวาให้เพียงพอต่อการเริ่มเดินของ
่
่
มอเตอร์ ดังนั้นเพื่อป้องกันจากสภาวะโหลดเกิน จึงต้องติดตั้งเครื่องป้องกันโหลดเกินเป็นการเฉพาะ เรียกว่าโอ
เวอร์โหลดรีเลย์ (Overload Relay) หรือ รีเลย์โหลดเกิน โดยทั่วไปจะสามารถปรับตั้งค่ากระแสไฟฟ้าได้ แต่ไม่
เกิน 115% ของกระแสพิกัดมอเตอร์ ส าหรับการปรับตั้งโอเวอร์โหลดรีเลย์ของการเริ่มเดินแบบสตาร์ – เดลต้า
ให้ใช้พิกัดกระแสสูงสุดคูณ 1.25 หารด้วย √3
32025301 การควบคุมไฟฟ้าและนิวแมติก