
Page 248 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 248
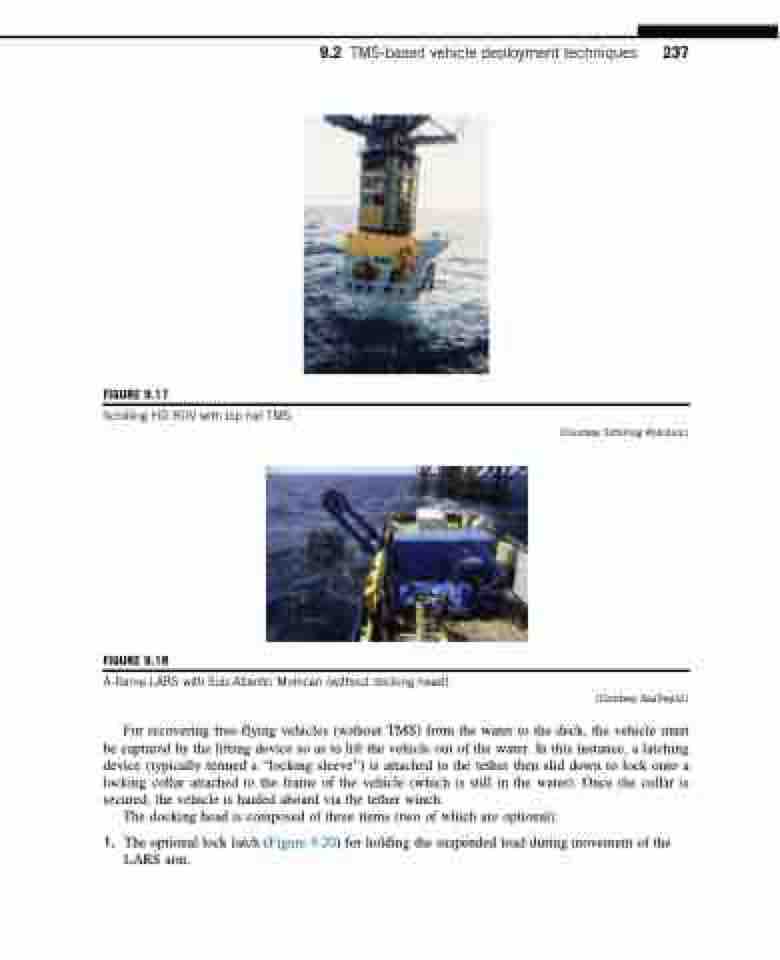
FIGURE 9.17
Schilling HD ROV with top hat TMS.
9.2 TMS-based vehicle deployment techniques 237
(Courtesy Schilling Robotics.)
FIGURE 9.18
A-frame LARS with Sub-Atlantic Mohican (without docking head).
For recovering free-flying vehicles (without TMS) from the water to the deck, the vehicle must be captured by the lifting device so as to lift the vehicle out of the water. In this instance, a latching device (typically termed a “locking sleeve”) is attached to the tether then slid down to lock onto a locking collar attached to the frame of the vehicle (which is still in the water). Once the collar is secured, the vehicle is hauled aboard via the tether winch.
The docking head is composed of three items (two of which are optional):
1. The optional lock latch (Figure 9.20) for holding the suspended load during movement of the LARS arm.
(Courtesy SeaTrepid.)
