
Page 124 - คู่มือสร้างและพัฒนาโปรแกรม Arduino และ POP-BOT
P. 124
124
ในกิ จกรรมนี้ นํ าเสนอตั วอย างการขั บเซอร โวมอเตอร ขนาดเล็ กอย างง าย
A9.1.1 เป ดโปรแกรม Arduino IDE เขี ยนโปรแกรมภาษา C ตามโปรแกรมที่ A9-1
A9.1.2 จากนั้ นทํ าการคอมไพล แล วอั ปโหลดไปยั งหุ นยนต POP-BOT จากนั้ นป ดสวิ ตช ปลดสายดาวน โหลดออก
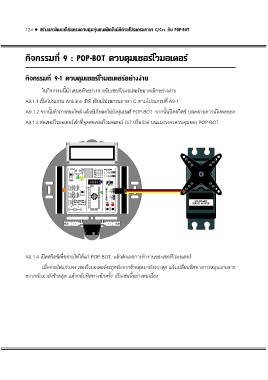
A9.1.3 ต อเซอร โวมอเตอร เข าที่ จุ ดต อเซอร โวมอเตอร Di7 หรื อ Di8 บนแผงวงจรควบคุ มของ POP-BOT
RS-232
4-12Vdc MOTOR Distance=P8robCM RAWoData=i307rR -
ON + ON 14: Speaker 3 : MotorA1 5 : MotorA2 9 : MotorB1 6 : MotorB2 A B
BAT
POWER
SERVO PORT +Vm - 8
1
15/A1
14/A0
RESET ATMEGA168 +Vm -
16/A2
18/SDA/A4
Port function 7 STANDARD
Number : Digital Di2 Di4 SERVO MOTOR
Ax : Analog pin x
A6 A7 12 13
19/SCL/A5
POP-168
A9.1.4 เป ดสวิ ตช เพื่ อจ ายไฟให แก POP-BOT. แล วสั งเกตการทํ างานของเซอร โวมอเตอร
เมื่ อจ ายไฟแก วงจร เซอร โวมอเตอร จะถู กขั บจากซ ายสุ ดมายั งขวาสุ ด แล วเปลี่ ยนทิ ศทางการหมุ นแกนจาก
ขวากลั บมายั งซ ายสุ ด แล วกลั บทิ ศทางอี กครั้ ง เป นเช นนี้ อย างต อเนื่ อง