
Page 22 - DM23
P. 22
Actus
HANDICAP
L’exosquelette, une première mondiale
en France
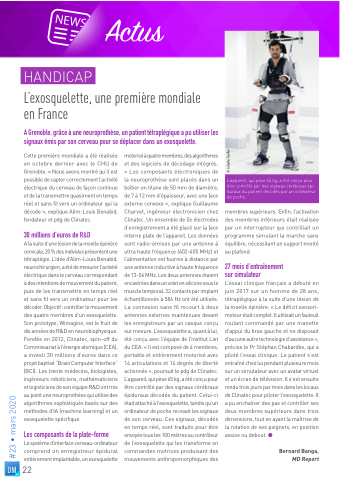
A Grenoble, grâce à une neuroprothèse, un patient tétraplégique a pu utiliser les signaux émis par son cerveau pour se déplacer dans un exosquelette.
L’appareil, qui pèse 65 kg, a été conçu pour être contrôlé par des signaux cérébraux épi- duraux du patient décodés par un ordinateur de poche.
Cette première mondiale a été réalisée en octobre dernier avec le CHU de Grenoble . « Nous avons montré qu’il est possible de capter correctement l’activité électrique du cerveau de façon continue et de la transmettre quasiment en temps réel et sans fil vers un ordinateur qui la décode », explique Alim-Louis Benabid, fondateur et pdg de Clinatec .
30 millions d’euros de R&D
A la suite d’une lésion de la moelle épinière cervicale, 20 % des individus présentent une tétraplégie . L’idée d’Alim-Louis Benabid, neurochirurgien, a été de mesurer l’activité électrique dans le cerveau correspondant à des intentions de mouvement du patient, puis de les transmettre en temps réel et sans fil vers un ordinateur pour les décoder .Objectif:contrôlerlemouvement des quatre membres d’un exosquelette . Son prototype, Wimagine, est le fruit de dix années de R&D en neurobiophysique . Fondée en 2012, Clinatec, spin-off du Commissariat à l’énergie atomique (CEA), a investi 30 millions d’euros dans ce projet baptisé “Brain Computer Interface” (BCI) . Les trente médecins, biologistes, ingénieurs roboticiens, mathématiciens et logisticiens de son équipe R&D ont mis au point une neuroprothèse qui utilise des algorithmes sophistiqués basés sur des méthodes d’IA (machine learning) et un exosquelette spécifique .
Les composants de la plate-forme
Le système d’interface cerveau-ordinateur comprend un enregistreur épidural entièrement implantable, un exosquelette
motoriséàquatremembres,desalgorithmes et des logiciels de décodage intégrés . « Les composants électroniques de la neuroprothèse sont placés dans un boîtier en titane de 50 mm de diamètre, de 7 à 12 mm d’épaisseur, avec une face externe convexe », explique Guillaume Charvet, ingénieur électronicien chez Clinatec . Un ensemble de 56 électrodes d’enregistrement a été placé sur la face interne plate de l’appareil . Les données sont radio-émises par une antenne à ultra haute fréquence (402-405 MHz) et l’alimentation est fournie à distance par une antenne inductive à haute fréquence de 13-56 MHz . Les deux antennes étaient encastrées dans un volet en silicone sous le muscle temporal . 32 contacts par implant échantillonnés à 586 Hz ont été utilisés . Laconnexionsansfilrecourtàdeux antennes externes maintenues devant les enregistreurs par un casque conçu sur mesure . L’exosquelette a, quant à lui, été conçu avec l’équipe de l’institut List du CEA . « Il est composé de 4 membres, portable et entièrement motorisé avec 14 articulations et 14 degrés de liberté actionnés », poursuit le pdg de Clinatec . L’appareil, qui pèse 65 kg, a été conçu pour être contrôlé par des signaux cérébraux épiduraux décodés du patient . Celui-ci était attaché à l’exosquelette, tandis qu’un ordinateur de poche recevait les signaux de son cerveau . Ces signaux, décodés en temps réel, sont traduits pour être envoyés tous les 100 mètres au contrôleur de l’exosquelette qui les transforme en commandes motrices produisant des mouvements anthropomorphiques des
membres supérieurs . Enfin, l’activation des membres inférieurs était réalisée par un interrupteur qui contrôlait un programme simulant la marche sans équilibre, nécessitant un support monté au plafond .
27 mois d’entraînement
sur simulateur
L’essai clinique français a débuté en juin 2017 sur un homme de 28 ans, tétraplégique à la suite d’une lésion de lamoelleépinière .«Ledéficitsensori- moteur était complet . Il utilisait un fauteuil roulant commandé par une manette d’appui du bras gauche et ne disposait d’aucune autre technologie d’assistance », précise le Pr Stéphan Chabardès, qui a piloté l’essai clinique . Le patient s’est entraîné chez lui pendant plusieurs mois sur un simulateur avec un avatar virtuel et un écran de télévision . Il s’est ensuite rendu trois jours par mois dans les locaux de Clinatec pour piloter l’exosquelette . Il a pu enchaîner des pas et contrôler ses deux membres supérieurs dans trois dimensions, tout en ayant la maîtrise de la rotation de ses poignets, en position assise ou debout . l
Bernard Banga, MD Report
Dm
22
MAG
#23 • mars 2020
© Juliette Treillet
