
Page 4 - Parker - Ethernet Powerlink
P. 4
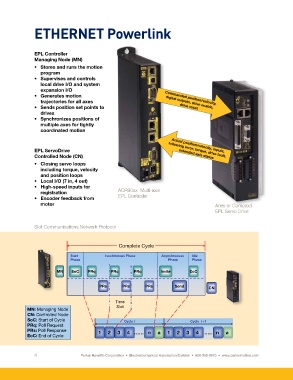
ETHERNET Powerlink
EPL Controller
Managing Node (MN)
• Stores and runs the motion
program
• Supervises and controls
local drive I/O and system
expansion I/O
• Generates motion Commanded position/velocity,
trajectories for all axes digital outputs, drive enable,
• Sends position set points to drive reset
drives
• Synchronizes positions of
multiple axes for tightly
coordinated motion
EPL ServoDrive following error, torque, drive fault,
Actual position/velocity, inputs,
Controlled Node (CN) extended axis status
• Closing servo loops
including torque, velocity
and position loops
• Local I/O (7 in, 4 out)
• High-speed inputs for
registration ACR90xx Multi-axis
• Encoder feedback from EPL Controller
motor Aries or Compax3
EPL Servo Drive
Slot Communications Network Protocol
Complete Cycle
Start Isochronous Phase Asynchronous Idle
Phase Phase Phase
MN SoC PRq PRq PRq Invite EoC
PRs PRs PRs Send CN
Time
Slot
MN: Managing Node
CN: Controlled Node
SoC: Start of Cycle Cycle i Cycle i +1
PRq: Poll Request
PRs: Poll Response 1 2 3 4 …… n a 1 2 3 4 ….. n a
EoC: End of Cycle
4 Parker Hannifin Corporation • Electromechanical Automation Division • 800-358-9070 • www.parkermotion.com