
Page 29 - Linde - HPR-02 Self regulating pump for open loop operation
P. 29
Controllers. TL2. Load Sensing with hyperbolic power limitation
The control principle with power limitation is used to optimize power utilization of the prime mover in applications where less
than the full power capacity is available for the hydraulic system. In addition to the load sensing function the HPR-02 TL2 offers
hyperbolic power limitation. The volume flow is limited when the set value is reached.
01 02 03 04 05 06 07 08 09 10 11
01 01
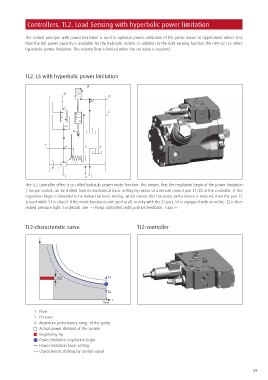
TL2. LS with hyperbolic power limitation
TL2 mit Modeschaltung Z1 + Z2
02 Z1 02
LS
Z2
S4
03 03
X
04 04
D1
05 05
P
P X T
06 06
0 max
07 T U L 07
The TL2 controller offers a so called hydraulic power mode function. This means, that the regulation begin of the power limitation
HPR-02-A2-TL20_Schaltplan_Katalog_v01
Projekt-Name:
Projekt-Titel:
/ torque control can be shifted from its mechanical basic setting by means of a remote control port Z1/Z2 at the controller. If the
Dokument-Name:
Schaltplan_TL2
08 Dokument-Titel: RA3 - P.Schlee 08
Projekt-Ersteller:
regulation begin is intended to be below the basic setting, which means that the pump performance is reduced, then the port Z2
RA3 - P.Schlee
Dokument-Ersteller:
Erstellt am: 16.03.2012 15:34:34
is used while S4 is closed. If the mode function is not used at all, or only with the Z1 port, S4 is equipped with an orifice. Z2 is then
16.03.2012 15:45:19
Zuletzt gespeichert:
01 02 03 04 05 06 07 08 09 10 11
sealed pressure tight. For details, see <<Pump controllers with position feedback. T-axis>>
TL2-characteristic curve TL2-controller
2
∆p Z1
Z2
1
Qmax
1 Flow
2 Pressure
Maximum performance range of the pump
Actual power demand of the system
Regulating ∆p
Power limitation regulation begin
Power limitation basic setting
Characteristic shifting by control signal
29