
Page 383 - Mechatronics with Experiments
P. 383
October 9, 2014 8:1
Printer: Yet to Come
JWST499-Cetinkunt
JWST499-c06
SENSORS 369 254mm×178mm
ratio) between sensor output and measured quantity (base displacement in this case), it is
necessary that (Figure 6.39b)
w ≫ w ; w min < w < w max (6.115)
n
This relationship states that an inertial accelerometer used to measure the seismic displace-
ment should be used in a frequency range that is larger than a certain minimum frequency,
w min , and that frequency should be at least as large or more than the natural frequency of
the sensor,
w < w < w (6.116)
n min
In other words, the natural frequency of an accelerometer used for seismic displace-
√
ment measurement should be very small. Since the w = k∕m, the mass of the seismic
n
accelerometer should be very large and the spring constant should be small. This explains
the reason for the large size of seismic accelerometers compared to normal accelerometers.
A given inertial acceleration sensor can measure accelerations with a frequency
content below its natural frequency, and displacements with a frequency content above its
natural frequency.
An inertial accelerometer cannot accurately measure seismic displacements that have
a frequency lower than the natural frequency of the sensor. Likewise, an inertial accelerom-
eter cannot measure accelerations that have a frequency content closer to or larger than
the natural frequency of the sensor. Inertial accelerometers used for seismic displacement
measurement must have as small a natural frequency as possible. Inertial accelerometers
used for acceleration measurement must have as large a natural frequency as possible.
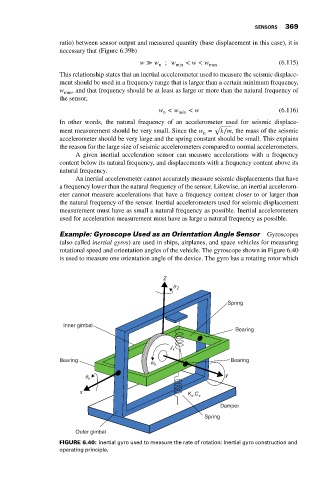
Example: Gyroscope Used as an Orientation Angle Sensor Gyroscopes
(also called inertial gyros) are used in ships, airplanes, and space vehicles for measuring
rotational speed and orientation angles of the vehicle. The gyroscope shown in Figure 6.40
is used to measure one orientation angle of the device. The gyro has a rotating rotor which
Z θ Z
Spring
Inner gimbal
Bearing
Bearing ω x J x Bearing
y
θ x
x K ,C
x x
Damper
Spring
Outer gimbal
FIGURE 6.40: Inertial gyro used to measure the rate of rotation: Inertial gyro construction and
operating principle.