
Page 428 - Mechatronics with Experiments
P. 428
JWST499-Cetinkunt
JWST499-c07
414 MECHATRONICS Printer: Yet to Come October 9, 2014 8:41 254mm×178mm
Command input
device Load
Controller
Cylinder
Valve
Accumulator
Electric
motor/engine Pump
P B
M/E P
Cross-over
relief valves
T A
Relief
valve
Filter Line relief
valves
Tank
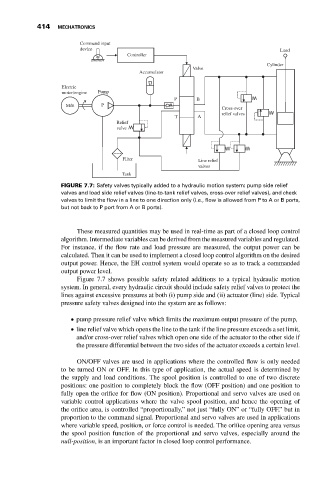
FIGURE 7.7: Safety valves typically added to a hydraulic motion system: pump side relief
valves and load side relief valves (line-to-tank relief valves, cross-over relief valves), and check
valves to limit the flow in a line to one direction only (i.e., flow is allowed from P to A or B ports,
but not back to P port from A or B ports).
These measured quantities may be used in real-time as part of a closed loop control
algorithm. Intermediate variables can be derived from the measured variables and regulated.
For instance, if the flow rate and load pressure are measured, the output power can be
calculated. Then it can be used to implement a closed loop control algorithm on the desired
output power. Hence, the EH control system would operate so as to track a commanded
output power level.
Figure 7.7 shows possible safety related additions to a typical hydraulic motion
system. In general, every hydraulic circuit should include safety relief valves to protect the
lines against excessive pressures at both (i) pump side and (ii) actuator (line) side. Typical
pressure safety valves designed into the system are as follows:
pump pressure relief valve which limits the maximum output pressure of the pump,
line relief valve which opens the line to the tank if the line pressure exceeds a set limit,
and/or cross-over relief valves which open one side of the actuator to the other side if
the pressure differential between the two sides of the actuator exceeds a certain level.
ON/OFF valves are used in applications where the controlled flow is only needed
to be turned ON or OFF. In this type of application, the actual speed is determined by
the supply and load conditions. The spool position is controlled to one of two discrete
positions: one position to completely block the flow (OFF position) and one position to
fully open the orifice for flow (ON position). Proportional and servo valves are used on
variable control applications where the valve spool position, and hence the opening of
the orifice area, is controlled “proportionally,” not just “fully ON” or “fully OFF,” but in
proportion to the command signal. Proportional and servo valves are used in applications
where variable speed, position, or force control is needed. The orifice opening area versus
the spool position function of the proportional and servo valves, especially around the
null-position, is an important factor in closed loop control performance.