
Page 60 - Mechatronics with Experiments
P. 60
46 MECHATRONICS
between the sensors and ON/OFF actuators. Such controls are generally implemented
using programmable logic controllers (PLC) in the automation industry. Servo control
loops may be part of such a control system. Closed loop servo control is often a sub-system
of the logic control systems where servo and logic control are hierarchically organized.
A control system is called closed loop if the control decisions are made based on
some sensor signals. If the control decisions do not take any sensor signal of the controlled
variables into account and decisions are made based on some pre-defined sequence or
operator commands, such a control system is called open loop. It has been long recognized
that using feedback information (sensor signals) about the controlled variable in determining
the control action provides robustness against changing conditions and disturbances.
2.1 COMPONENTS OF A DIGITAL CONTROL SYSTEM
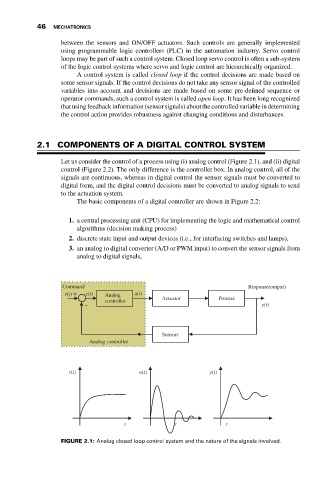
Let us consider the control of a process using (i) analog control (Figure 2.1), and (ii) digital
control (Figure 2.2). The only difference is the controller box. In analog control, all of the
signals are continuous, whereas in digital control the sensor signals must be converted to
digital form, and the digital control decisions must be converted to analog signals to send
to the actuation system.
The basic components of a digital controller are shown in Figure 2.2:
1. a central processing unit (CPU) for implementing the logic and mathematical control
algorithms (decision making process)
2. discrete state input and output devices (i.e., for interfacing switches and lamps),
3. an analog to digital converter (A/D or PWM input) to convert the sensor signals from
analog to digital signals,
Command Response(output)
r(t) + e(t) Analog u(t)
controller Actuator Process
- y(t)
Sensors
Analog controller
r(t) u(t) y(t)
t t t
FIGURE 2.1: Analog closed loop control system and the nature of the signals involved.