
Page 857 - Mechatronics with Experiments
P. 857
®
®
MATLAB , SIMULINK , STATEFLOW, AND AUTO-CODE GENERATION 843
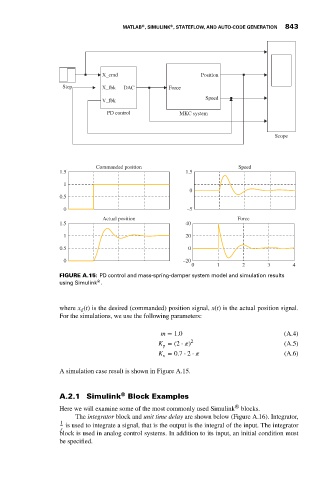
X_cmd Position
Step X_fbk DAC Force
V_fbk Speed
PD control MKC system
Scope
Commanded position Speed
1.5 1.5
1
0
0.5
0 –5
Actual position Force
1.5 40
1 20
0.5 0
0 –20
0 1 2 3 4
FIGURE A.15: PD control and mass-spring-damper system model and simulation results
®
using Simulink .
where x (t) is the desired (commanded) position signal, x(t) is the actual position signal.
d
For the simulations, we use the following parameters:
m = 1.0 (A.4)
K = (2 ⋅ ) 2 (A.5)
p
K = 0.7 ⋅ 2 ⋅ (A.6)
v
A simulation case result is shown in Figure A.15.
®
A.2.1 Simulink Block Examples
®
Here we will examine some of the most commonly used Simulink blocks.
The integrator block and unit time delay are shown below (Figure A.16). Integrator,
1
is used to integrate a signal, that is the output is the integral of the input. The integrator
s
block is used in analog control systems. In addition to its input, an initial condition must
be specified.