
Page 267 - 978-620-0-64375-9_Classical
P. 267
В технике применяется несколько видов волновых передач:
винтовые волновые передачи, предназначенные для преобразования
вращательного движения в поступательное и/или для передачи этого
движения в загерметезированное пространство;фрикционные волновые
передачи, предназначенные для преобразования (чаще всего сильного
редуцирования) вращательного движения и/или для передачи этого
движения в загерметезированное пространство, и зубчатые волновые
передачи, имеющие аналогичное фрикционным предназначение, но
способные передавать существенно большие мощности. Принцип
использования волновой деформации для передачи и преобразования
движения был предложен инженером А.И. Москвитиным в 1944 году
для фрикционной передачи с электромагнитным генератором волн, а в
1959 году в США был выдан патент Уолтону Массеру (Walton Musser)
на зубчатую передачу с механическим генератором волн. В дальнейшем
для силовых передач нашли применение главным образом зубчатые
волновые передачи, которые и будут рассмотрены в настоящей
лекции.Волновой механизм вращательного движения при
соответствующем исполнении может использоваться в качестве
редуцирующей передачи, мультипликатора или дифференциального
механизма. Наиболее широкое распространение получили зубчатые
волновые редукторы. Кинематически волновая передача может быть
отнесена к группе планетарных передач, то есть волновую передачу
следует рассматривать как планетарную, у которой одно из
центральных колёс выполнено в форме гибкого зубчатого венца.Гибкое
колесо в волновой передаче в зависимости от конструкции генератора
волн может нести одну, две, три и более волн деформации. Но,
поскольку передаточное отношение волновой передачи не зависит от
количества волн деформации на гибком колесе, а увеличение числа волн
способствует росту изгибных напряжений в теле гибкого колеса, чаще
всего используется симметричная двухволновая схема деформации
гибкого колеса, позволяющая исключить возможность возникновения
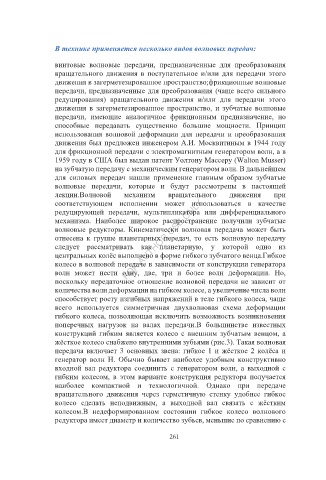
поперечных нагрузок на валах передачи.В большинстве известных
конструкций гибким является колесо с внешним зубчатым венцом, а
жёсткое колесо снабжено внутренними зубьями (рис.3). Такая волновая
передача включает 3 основных звена: гибкое 1 и жёсткое 2 колёса и
генератор волн H. Обычно бывает наиболее удобным конструктивно
входной вал редуктора соединить с генератором волн, а выходной с
гибким колесом, в этом варианте конструкция редуктора получается
наиболее компактной и технологичной. Однако при передаче
вращательного движения через герметичную стенку удобнее гибкое
колесо сделать неподвижным, а выходной вал связать с жёстким
колесом.В недеформированном состоянии гибкое колесо волнового
редуктора имеет диаметр и количество зубьев, меньшие по сравнению с
261