
Page 7 - 08_Dontsov
P. 7
ϕ R 0 , соответствующих 0 град и 20 град. Сплошной тонкой линией на рис. 7 обозначены зави-
симости, полученные при K =4, сплошной жирной – при K =5, пунктиром – при K =6.
n
n
n
Alexander A. Dontsov, Yuri L. Koziratsky… Mathematical Model of the Process of Destruc-tion of the Aircraft Guidance…
90 90 4
120 4 60 120 60
3 3
150 2 30 150 2 30
1 1
180 0 180 0
210 330 210 330
240 300 240 300
270 270
а) ϕ R 0 =0 град; б) ϕ R 0 =20 град
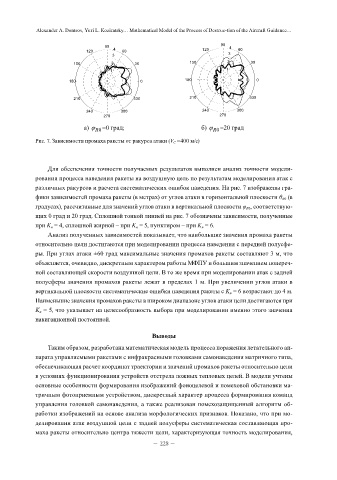
Рис. 7. Зависимости промаха ракеты от ракурса атаки (V С =400 м/с)
Рис. 7. Зависимости промаха ракеты от ракурса атаки (V С =400 м/с)
Анализ полученных зависимостей показывает, что наибольшие значения промаха ра-
кеты относительно цели достигаются при моделировании процесса наведения с передней по-
Для обеспечения точности получаемых результатов выполнен анализ точности модели-
лусферы. При углах атаки ±60 град максимальные значения промахов ракеты составляют
рования процесса наведения ракеты на воздушную цель по результатам моделирования атак с
различных ракурсов и расчета систематических ошибок наведения. На рис. 7 изображены гра-
3 м, что объясняется, очевидно, дискретным характером работы МФПУ и большим значени-
фики зависимостей промаха ракеты (в метрах) от углов атаки в горизонтальной плоскости θ R0 (в
ем поперечной составляющей скорости воздушной цели. В то же время при моделировании
градусах), рассчитанные для значений углов атаки в вертикальной плоскости φ R0 , соответствую-
атак с задней полусферы значения промахов ракеты лежат в пределах 1 м. При увеличении
щих 0 град и 20 град. Сплошной тонкой линией на рис. 7 обозначены зависимости, полученные
углов атаки в вертикальной плоскости систематические ошибки наведения ракеты с K =6
n
при K n = 4, сплошной жирной – при K n = 5, пунктиром – при K n = 6.
Анализ полученных зависимостей показывает, что наибольшие значения промаха ракеты
возрастают до 4 м. Наименьшие значения промахов ракеты в широком диапазоне углов атаки
относительно цели достигаются при моделировании процесса наведения с передней полусфе-
цели достигаются при K =5, что указывает на целесообразность выбора при моделировании
n
ры. При углах атаки ±60 град максимальные значения промахов ракеты составляют 3 м, что
именно этого значения навигационной постоянной.
объясняется, очевидно, дискретным характером работы МФПУ и большим значением попереч-
ной составляющей скорости воздушной цели. В то же время при моделировании атак с задней
полусферы значения промахов ракеты лежат в пределах 1 м. При увеличении углов атаки в
Выводы
вертикальной плоскости систематические ошибки наведения ракеты с K n = 6 возрастают до 4 м.
Таким образом, разработана математическая модель процесса поражения летательно-
Наименьшие значения промахов ракеты в широком диапазоне углов атаки цели достигаются при
го аппарата управляемыми ракетами с инфракрасными головками самонаведения матрично-
K n = 5, что указывает на целесообразность выбора при моделировании именно этого значения
навигационной постоянной.асчет координат траектории и значений промахов ракеты относи-
го типа, обеспечивающая р
тельно цели в условиях функционирования устройств отстрела ложных тепловых целей. В
Выводы
модели учтены основные особенности формирования изображений фоноцелевой и помехо-
Таким образом, разработана математическая модель процесса поражения летательного ап-
вой обстановки матричным фотоприемным устройством, дискретный характер процесса
парата управляемыми ракетами с инфракрасными головками самонаведения матричного типа,
формирования команд управления головкой самонаведения, а также реализован помехоза-
обеспечивающая расчет координат траектории и значений промахов ракеты относительно цели
щищенный алгоритм обработки изображений на основе анализа морфологических призна-
в условиях функционирования устройств отстрела ложных тепловых целей. В модели учтены
основные особенности формирования изображений фоноцелевой и помеховой обстановки ма-
ков. Показано, что при моделировании атак воздушной цели с задней полусферы системати-
тричным фотоприемным устройством, дискретный характер процесса формирования команд
управления головкой самонаведения, а также реализован помехозащищенный алгоритм об-
7
работки изображений на основе анализа морфологических признаков. Показано, что при мо-
делировании атак воздушной цели с задней полусферы систематическая составляющая про-
маха ракеты относительно центра тяжести цели, характеризующая точность моделирования,
– 228 –