
Page 196 - C Programming
P. 196
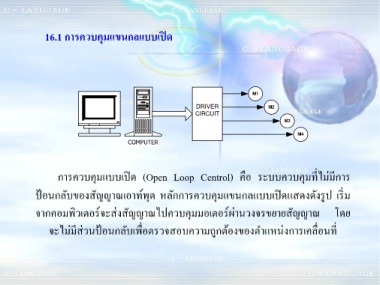
16.1 การควบคุมแขนกลแบบเปิด
M1
DRIVER M2
CIRCUIT
M3
M4
COMPUTER
การควบคุมแบบเปิด (Open Loop Centrol) คือ ระบบควบคุมที่ไม่มีการ
ป้อนกลับของสัญญาณเอาท์พุต หลักการควบคุมแขนกลแบบเปิดแสดงดังรูป เริ่ม
จากคอมพิวเตอร์จะส่งสัญญาณไปควบคุมมอเตอร์ผ่านวงจรขยายสัญญาณ โดย
จะไม่มีส่วนป้อนกลับเพื่อตรวจสอบความถูกต้องของตําแหน่งการเคลื่อนที่