
Page 120 - ArduinoและPOP-BOT
P. 120
120
SERVO MOTOR
STANDARD
SERVO MOTOR
STANDARD
STANDARD
SERVO MOTOR
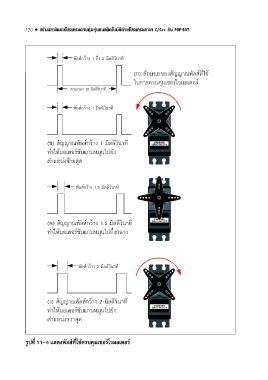
รู ปที่ 11-4 แสดงพั ลส ที่ ใช ควบคุ มเซอร โวมอเตอร