
Page 119 - ArduinoและPOP-BOT
P. 119
119
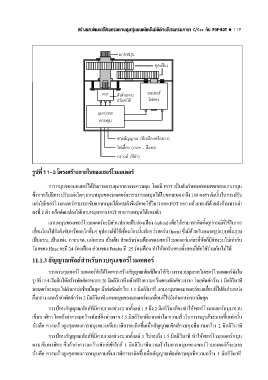
รู ปที่ 11-3 โครงสร างภายในของเซอร โวมอเตอร
การหมุ นของมอเตอร ได รั บการควบคุ มจากวงจรควบคุ ม โดยมี POT เป นตั วกํ าหนดขอบเขตของแกนหมุ น
ซึ่ งหากไม มี การปรั บแต งใดๆ แกนหมุ นของมอเตอร จะสามารถหมุ นได ในขอบเขต 0 ถึ ง 180 องศา ดั งนั้ นในการปรั บ
แต งให เซอร โวมอเตอร สามารถขั บแกนหมุ นได รอบตั วจึ งมั กจะใช วี การถอด POT ออก แล วแทนที่ ด วยตั วต านทานค า
คงที่ 2 ตั ว หรื อดั ดแปลงให แกนหมุ นของ POT สามารถหมุ นได รอบตั ว
แกนหมุ นของเซอร โวมอเตอร จะมี ส วนปลายเป นร องเฟ อง (spline) เพื่ อให สามารถติ ดตั้ งอุ ปกรณ ที่ ใช ในการ
เชื่ อมโยงไปยั งตั วขั บหรื อกลไกอื่ นๆ อุ ปกรณ ที่ ใช เชื่ อมโยงนั้ นเรี ยกว า ฮอร น (horn) ซึ่ งมี ด วยกั นหลายรู ปแบบทั้ งแบบ
เป นแขน, เป นแท ง, กากบาท, แผ นกลม เป นต น สํ าหรั บร องเฟ องของเซอร โวมอเตอร แต ละยี่ ห อก็ มี จํ านวนไม เท ากั น
โดยของ Hitec จะมี 24 ร องเฟ อง ส วนของ Futaba มี 25 ร องเฟ อง ทํ าให ฮอร นของทั้ งสองยี่ ห อใช ร วมกั นไม ได
11.1.3 สั ญญาณพั ลส สํ าหรั บควบคุ มเซอร โวมอเตอร
การควบคุ มเซอร โวมอเตอร ทํ าได โดยการสร างสั ญญาณพั ลส ป อนให กั บวงจรควบคุ มภายในเซอร โวมอเตอร ดั งใน
รู ปที่ 11-4 เริ่ มต นให สร างพั ลส คาบเวลา 20 มิ ลลิ วิ นาที แล วปรั บความกว างของพั ลส ช วงบวก โดยพั ลส กว าง 1 มิ ลลิ วิ นาที
มอเตอร จะหมุ นไปตํ าแหน งซ ายมื อสุ ด ถ าส งพั ลส กว าง 1.5 มิ ลลิ วิ นาที แกนหมุ นของมอเตอร จะเคลื่ อนที่ ไปยั งตํ าแหน ง
กึ่ งกลาง และถ าส งพั ลส กว าง 2 มิ ลลิ วิ นาที แกนหมุ นของมอเตอร จะเคลื่ อนที่ ไปยั งตํ าแหน งขวามื อสุ ด
การป อนสั ญญาณพั ลส ที่ มี คาบเวลาช วงบวกตั้ งแต 1.5 ถึ ง 2 มิ ลลิ วิ นาที จะทํ าให เซอร โวมอเตอร หมุ นทวน
เข็ มนาฬิ กา โดยถ าค าความกว างพั ลส ยิ่ งห างจาก 1.5 มิ ลลิ วิ นาที มากเท าใด ความเร็ วในการหมุ นก็ จะมากขึ้ นเท านั้ น
นั่ นคื อ ความเร็ วสู งสุ ดของการหมุ นทวนเข็ มนาฬิ กาจะเกิ ดขึ้ นเมื่ อสั ญญาณพั ลส ควบคุ มที่ ความกว าง 2 มิ ลลิ วิ นาที
การป อนสั ญญาณพั ลส ที่ มี คาบเวลาช วงบวกตั้ งแต 1 ไปจนถึ ง 1.5 มิ ลลิ วิ นาที ทํ าให เซอร โวมอเตอร หมุ น
ตามเข็ มนาฬิ กา ซึ่ งถ าค าความกว างพั ลส เข าใกล 1 มิ ลลิ วิ นาที ความเร็ วในการหมุ นของเซอร โวมอเตอร ก็ จะมาก
นั่ นคื อ ความเร็ วสู งสุ ดของการหมุ นตามเข็ มนาฬิ กาจะเกิ ดขึ้ นเมื่ อสั ญญาณพั ลส ควบคุ มที่ ความกว าง 1 มิ ลลิ วิ นาที