
Page 117 - ArduinoและPOP-BOT
P. 117
117
ในบทนี้ นํ าเสนอการควบคุ มเซอร โวมอเตอร ของหุ นยนต POP-BOT โดยแผงวงจรควบคุ มหลั กของหุ นยนต
สามารถขั บเซอร โวมอเตอร ได 2 ตั ว ผ านทางจุ ดต อพอร ต Di7 และ Di8 ซึ่ งจะเรี ยกว า เอาต พุ ตเซอร โวมอเตอร
11.1 หลั กการทํ างานของเซอร โวมอเตอร
เซอร โวมอเตอร ที่ ใช ในหุ นยนต POP-BOT เป นเซอร โวมอเตอร แบบอะนาลอกขนาดเล็ ก บางครั้ งเรี ยกว า
R/C เซอร โวมอเตอร โดย R/C มาจากคํ าว า Radio Control เนื่ องจากในอดี ต เซอร โวมอเตอร มั กนํ าไปใช ในการขั บ
เคลื่ อนกลไกในเครื่ องบิ น, รถ หรื อเรื อที่ บั งคั บด วยคลื่ นวิ ทยุ การกํ าหนดชื่ อ R/C เพื่ อให ทราบถึ งประเภทของงาน
ที่ นํ าเซอร โวมอเตอร นี้ ไปใช นั่ นเอง
เซอร โวมอเตอร เป นอุ ปกรณ แม เหล็ กไฟฟ าแบบหนึ่ งที่ ใช ในการหมุ นตั วขั บ (actuator) ไปยั งตํ าแหน งต างๆ ด วย
ความแม นยํ า ปกติ แล วเซอร โวมอเตอร ที่ ยั งไม ได รั บการปรั บแต งใดๆ นั้ นจะใช งานกั นอยู ในรถ, เรื อ หรื อเครื่ องบิ นบั งคั บ
วิ ทยุ เพื่ อทํ าหน าที่ ควบคุ มตํ าแหน งของอุ ปกรณ เช น การบั งคั บเลี้ ยวของรถบั งคั บวิ ทยุ หรื อใช สํ าหรั บปรั บหางเสื อของ
เรื อหรื อเครื่ องบิ น ซึ่ งงานเหล านี้ ต องการแรงบิ ดของมอเตอร ที่ สู งพอสมควรดั งนั้ นเซอร โวมอเตอร จึ งมี อั ตราทดที่ มาก
พอสมควรเพื่ อให สามารถรองรั บงานดั งกล าวได
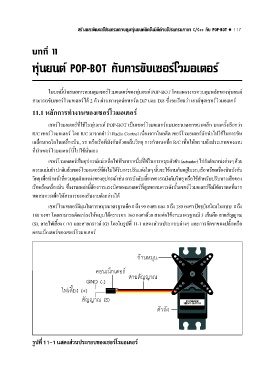
เซอร โวมอเตอร มี มุ มในการหมุ นมาตรฐานคื อ 0 ถึ ง 90 องศา และ 0 ถึ ง 180 องศา ป จจุ บั นนิ ยมในแบบ 0 ถึ ง
180 องศา โดยสามารถดั ดแปลงให หมุ นได ครบรอบ 360 องศาด วย สายต อใช งานมาตรฐานมี 3 เส นคื อ สายสั ญญาณ
(S), สายไฟเลี้ ยง (+V) และสายกราวด (G) โดยในรู ปที่ 11-1 แสดงส วนประกอบต างๆ และการจั ดขาของปลั๊ กหรื อ
คอนเน็ กเตอร ของเซอร โวมอเตอร
STANDARD
SERVO MOTOR
รู ปที่ 11-1 แสดงส วนประกอบของเซอร โวมอเตอร