
Page 118 - ArduinoและPOP-BOT
P. 118
118
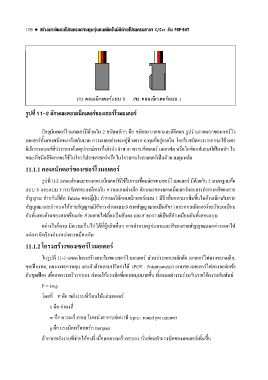
รู ปที่ 11-2 ลั กษณะคอนเน็ กเตอร ของเซอร โวมอเตอร
ป จจุ บั นเซอร โวมอเตอร มี ด วยกั น 2 ชนิ ดหลั กๆ คื อ ชนิ ดอะนาลอกและดิ จิ ตอล รู ปร างภายนอกของเซอร โว
มอเตอร ทั้ งสองชนิ ดจะคล ายกั นมาก ความแตกต างจะอยู ที่ วงจรควบคุ มที่ อยู ภายใน โดยในชนิ ดอะนาลอกจะใช วงจร
อิ เล็ กทรอนกส ที่ ประกอบด วยอุ ปกรณ สารกึ่ งตั วนํ า จํ าพวก ทรานซิ สเตอร มอสเฟต หรื อไอซี ออปแอมป เป นหลั ก ใน
ขณะที่ ชนิ ดดิ จิ ตอลจะใช ไมโครโปรเซสเซอร หรื อไมโครคอนโทรลเลอร เป นตั วควบคุ มหลั ก
11.1.1 คอนเน็ กตอร ของเซอร โวมอเตอร
รู ปที่ 11-2 แสดงลั กษณะของคอนเน็ กเตอร ที่ ใช ในการเชื่ อมต อของเซอร โวมอเตอร มี ด วยกั น 2 มาตรฐานคื อ
แบบ S และแบบ J การจั ดขาจะเหมื อนกั น ความแตกต างคื อ ลั กษณะของคอนเน็ กเตอร และการกํ าหนดสี ของสาย
สั ญญาณ สํ าหรั บยี่ ห อ Futaba ของญี่ ปุ น กํ าหนดให คอนเน็ กเตอร แบบ J มี ป กยื่ นออกมาเพิ่ มขึ้ นในด านเดี ยวกั บสาย
สั ญญาณ และกํ าหนดให สายสั ญญาณมี สี ขาว ส วนแบบ S สายสั ญญาณจะเป นสี ขาว และคอนเน็ กเตอร จะเรี ยบเหมื อน
กั นทั้ งสองด านของสายเชื่ อมต อ ส วนสายไฟเลี้ ยงเป นสี แดง และสายกราวด เป นสี ดํ าเหมื อนกั นทั้ งสองแบบ
อย างไรก็ ตาม มี ความเป นไปได ที่ ผู ผลิ ตอื่ นๆ อาจกํ าหนดรู ปแบบและสี ของสายสั ญญาณแตกต างออกไป
แต การจั ดเรี ยงตํ าแหน งจะเหมื อนกั น
11.1.2 โครงสร างของเซอร โวมอเตอร
ในรู ปที่ 11-3 แสดงโครงสร างภายในของเซอร โวมอเตอร ส วนประกอบหลั กคื อ มอเตอร ไฟตรงขนาดเล็ ก,
ชุ ดเฟ องทด, แผงวงจรควบคุ ม และตั วต านทานปรั บค าได (POT : Potentiometer) แกนของมอเตอร ไฟตรงจะต อเข า
กั บชุ ดเฟ อง เพื่ อลดความเร็ วรอบลง ส งผลให แรงบิ ดที่ แกนหมุ นมากขึ้ น ทั้ งหมดทํ างานร วมกั นภายใต ความสั มพั นธ
P = kwg
โดยที่ P คื อ พลั งงานที่ ป อนให แก มอเตอร
k คื อ ค าคงที่
w คื อ ความเร็ วรอบ ในหน วย รอบต อนาที (rpm : round per minute)
g คื อ แรงบิ ดหรื อทอร ค (torque)
ถ าหากพลั งงานที่ จ ายให คงที่ เมื่ อลดความเร็ วรอบลง นั่ นย อมทํ าแรงบิ ดของมอเตอร เพิ่ มขึ้ น