
Page 112 - ArduinoและPOP-BOT
P. 112
112
ผลลั พธ ที่ ได จากโมดู ล GP2D120 เป นค าการเปลี่ ยนแปลงแรงดั น เมื่ อนํ ามาเชื่ อมต อกั บหุ นยนต POP-BOT
และทํ าการเขี ยนโปรแกรมภาษา C ด วย Arduino IDE เพื่ ออ านค า จะใช ฟ งก ชั่ น getdist() จากไฟล ไลบรารี
gp2d120_lib.h เพื่ ออ านค าจากโมดู ล GP2D120 ซึ่ งในกิ จกรรมนี้ ต อที่ จุ ดต อ An5
ส วนโปรแกรมที่ ใช ในการทดสอบการทํ างานแสดงในโปรแกรมที่ A7-1 โดยในโปรแกรมนี้ นอกจากจะอ าน
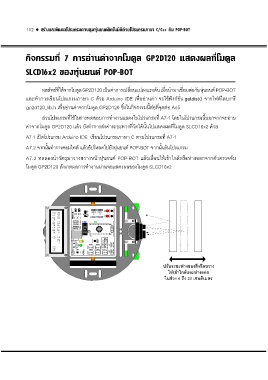
ค าจากโมดู ล GP2D120 แล ว ยั งทํ าการส งค าระยะทางที่ วั ดได นั้ นไปแสดงผลที่ โมดู ล SLCD16x2 ด วย
A7.1 เป ดโปรแกรม Arduino IDE เขี ยนโปรแกรมภาษา C ตามโปรแกรมที่ A7-1
A7.2 จากนั้ นทํ าการคอมไพล แล วอั ปโหลดไปยั งหุ นยนต POP-BOT จากนั้ นรั นโปรแกรม
A7.3 ทดลองนํ าวั ตถุ มาวางขวางหน าหุ นยนต POP-BOT แล วเลื่ อนให เข าใกล หรื อห างออกจากตั วตรวจจั บ
โมดู ล GP2D120 สั งเกตผลการทํ างานผ านจอแสดงผลของโมดู ล SLCD16x2
Di4
8
7
-
-
MOTOR A B +Vm +Vm SERVO PORT Di2
6 : MotorB2
9 : MotorB1
13
5 : MotorA2
3 : MotorA1
ATMEGA168 POP-168
14: Speaker
12
1
BAT RESET Number : Digital Ax : Analog pin x
RS-232
+ ON 15/A1 16/A2 Port function A7
4-12Vdc ON POWER 14/A0 18/SDA/A4 19/SCL/A5 A6
Distance=P8robCM
RAWoData=i307rR -
ปรับระยะหางของสิ่งกีดขวาง
ใหเขาใกลและหางออก
ในชวง 4 ถึง 32 เซนติเมตร