
Page 109 - ArduinoและPOP-BOT
P. 109
109
อี กหนึ่ งตั วอย างของการใช งานอิ นพุ ตอะนาลอกของไมโครคอนโทรลเลอร POP-168 และฟ งก ชั่ นอ านค า
สั ญญาณอะนาลอกของ Arduino คื อ การติ ดต อกั บตั วตรวจจั บพิ เศษที่ ให ผลการทํ างานเป นแรงดั น แต สามารถให ผล
การทํ างานเป นค าหรื อปริ มาณทางฟ สิ กส ที่ ชั ดเจน โมดู ลวั ดระยะทางด วยแสงอิ นฟราเรด GP2D120 เป นตั วอย างของ
ตั วตรวจจั บที่ มี การทํ างานในลั กษณะนี้ ผลของการตรวจจั บของ GP2D120 สามารถนํ าไปคํ านวณด วยกระบวนการทาง
ซอฟต แวร เพื่ อให ได ผลการทํ างานออกมาเป นระยะทางในหน วยเซนติ เมตรหรื อนิ้ วได ตามต องการ
การใช งานโมดู ล GP2D120 ในหุ นยนต POP-BOT คื อ นํ ามาใช ตรวจจั บวั ตถุ แบบไม สั มผั ส (contact less)
รวมไปถึ งสามารถนํ าไปใช ในการค นหาวั ตถุ หรื อสิ่ งกี ดขวางได
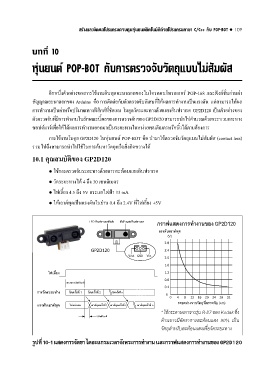
10.1 คุ ณสมบั ติ ของ GP2D120
ใช การตรวจจั บระยะทางด วยการสะท อนแสงอิ นฟราเรด
วั ดระยะทางได 4 ถึ ง 30 เซนติ เมตร
ไฟเลี้ ยง 4.5 ถึ ง 5V กระแสไฟฟ า 33 mA
ให เอาต พุ ตเป นแรงดั นในย าน 0.4 ถึ ง 2.4V ที่ ไฟเลี้ ยง +5V
กราฟแสดงการทํ างานของ GP2D120
LED อินฟราเรดตัวสง ตัวรับแสงอินฟราเรด
แรงดันเอาตพุต
(V)
2.8
GP2D120 2.4
Vout GND Vcc
2.0
1.6
ไฟเลี้ยง 1.2
0.8
38.3ฑ9.6 มิลลิวินาที
0.4
การวัดระยะหาง วัดครั้งที่ 1 วัดครั้งที่ 2 วัดครั้งที่ n
0
0 4 8 12 16 20 24 28 32
ระยะหางจากวัตถุที่ตรวจจับ (cm)
แรงดันเอาตพุต ไมแนนอน เอาตพุตครั้งที่ 1 เอาตพุตครั้งที่ 2 เอาตพุตครั้งที่ n
* ใช กระดาษเทาขาวรุ น R-27 ของ Kodak ซึ่ ง
5 มิลลิวินาที
ด านขาวมี อั ตราการสะท อนแสง 90% เป น
วั ตถุ สํ าหรั บสะท อนแสงเพื่ อวั ดระยะทาง
รู ปที่ 10-1 แสดงการจั ดขา ไดอะแกรมเวลาจั งหวะการทํ างาน และกราฟแสดงการทํ างานของ GP2D120