
Page 104 - ArduinoและPOP-BOT
P. 104
104
รู ปแบบเบื้ องต นของการเขี ยนโปรแกรมให หุ นยนต เคลื่ อนที่ ตามเส นมี 3 รู ปแบบคื อ
1. กรณี ที่ แผงวงจรตรวจจั บแสงสะท อนอิ นฟราเรดทั้ งสองชุ ดคร อมอยู บนเส น การสั่ งการจากโปรแกรม
จะกํ าหนดให หุ นยนต เคลื่ อนที่ ไปด านหน า
2. กรณี ที่ แผงวงจรด านซ ายตรวจจั บพบเส นสี ดํ า แสดงว า หุ นยนต เอี ยงตั วออกนอกเส นไปทางขวา
ให เอี ยงตั วทางซ ายเพื่ อกลั บไปคร อมอยู บนเส น
3. กรณี ที่ แผงวงจรด านขวาตรวจจั บพบเส นสี ดํ า แสดงว า หุ นยนต เอี ยงตั วออกนอกเส นทางด านซ าย
มื อ ให เอี ยงตั วทางขวา กลั บไปคร อมอยู บนเส น
13 POP-168 12 A7 A6 13 POP-168 12 A7 A6
13 POP-168 12 A7 A6 Di4 Di2 Ax : Analog pin x Number : Digital 19/SCL/A5 Di4 Di2 Ax : Analo g pin x Number : Digital 19/SCL/A5
19/SCL/A5 Ax : Analog p in x Number : Digital Port function 7 +Vm - ATMEGA168 Port function 7 +Vm - ATMEGA168 Port function
Di2
Di4
ATMEGA16 8 RESET 16/A2 18/SDA/A4 8 +Vm - SERVO PORT RESET 16/A2 18/SDA/A4 8 +Vm - SERVO PORT RESET 16/A2 18/SDA/A4
7
+Vm -
8
+Vm -
1 15/A1 14/A0 POWER 1 BAT 15/A1 14/A0 POWER 1 BAT 15/A1 14/A0 POWER
SERVO PORT
B A 6 : MotorB2 MOTOR 9 : MotorB1 5 : MotorA2 3 : MotorA1 14: Speaker RS-232 BAT ON + ON 4-12Vdc B A 6 : MotorB2 MOTOR 9 : MotorB1 5 : MotorA2 3 : MotorA1 14: Speaker RS-232 + ON ON 4-12Vdc B A 6 : MotorB2 MOTOR 9 : MotorB1 5 : MotorA2 3 : MotorA1 14: Speaker RS-232 + ON ON 4-12Vdc
- oRobo - SpinnerR - - oRobo - SpinnerR -
- oRobo- SpinnerR - ArduinoPOPRrobot ArduinoPOPRrobot
ArduinoPOPRrobot
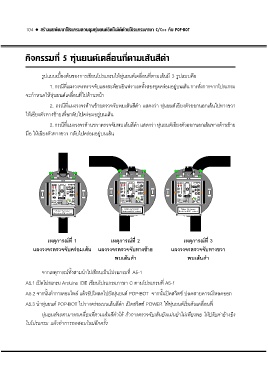
เหตุ การณ ที่ 1 เหตุ การณ ที่ 2 เหตุ การณ ที่ 3
แผงวงจรตรวจจั บคร อมเส น แผงวงจรตรวจจั บทางซ าย แผงวงจรตรวจจั บทางขวา
พบเส นดํ า พบเส นดํ า
จากเหตุ การณ ทั้ งสามนํ าไปเขี ยนเป นโปรแกรมที่ A5-1
A5.1 เป ดโปรแกรม Arduino IDE เขี ยนโปรแกรมภาษา C ตามโปรแกรมที่ A5-1
A5.2 จากนั้ นทํ าการคอมไพล แล วอั ปโหลดไปยั งหุ นยนต POP-BOT จากนั้ นป ดสวิ ตช ปลดสายดาวน โหลดออก
A5.3 นํ าหุ นยนต POP-BOT ไปวางคร อมบนเส นสี ดํ า เป ดสวิ ตช POWER ให หุ นยนต เริ่ มต นเคลื่ อนที่
หุ นยนต จะสามารถเคลื่ อนที่ ตามเส นสี ดํ าได ถ าการตรวจจั บเส นยั งแม นยํ าไม เพี ยงพอ ให ปรั บค าอ างอิ ง
ในโปรแกรม แล วทํ าการทดสอบใหม อี กครั้ ง