
Page 133 - ArduinoและPOP-BOT
P. 133
133
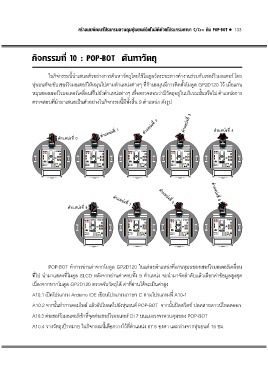
ในกิ จกรรมนี้ นํ าเสนอตั วอย างการค นหาวั ตถุ โดยใช โมดู ลวั ดระยะทางทํ างานร วมกั บเซอร โวมอเตอร โดย
หุ นยนต จะขั บเซอร โวมอเตอร ให หมุ นไปตามตํ าแหน งต างๆ ที่ ก านหมุ นมี การติ ดตั้ งโมดู ล GP2D120 ไว เมื่ อแกน
หมุ นของเซอร โวมอเตอร เคลื่ อนที่ ไปยั งตํ าแหน งต างๆ เพื่ อตรวจสอบว ามี วั ตถุ อยู ในบริ เวณนั้ นหรื อไม ตํ าแหน งการ
ตรวจสอบที่ นํ ามาเสนอเป นตั วอย างในกิ จกรรมนี้ มี ทั้ งสิ้ น 9 ตํ าแหน ง ดั งรู ป
RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- +
Distance=P8robCM Distance=P8robCM Distance=P8robCM Distance=P8robCM Distance=P8robCM
RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- +
Distance=P8robCM Distance=P8robCM Distance=P8robCM Distance=P8robCM
POP-BOT ทํ าการอ านค าจากโมดู ล GP2D120 ในแต ละตํ าแหน งที่ แกนหุ มนของเซอร โวมอเตอร เคลื่ อน
ที่ ไป นํ ามาแสดงที่ โมดู ล SLCD หลั งจากอ านค าครบทั้ ง 9 ตํ าแหน ง จะนํ ามาจั ดลํ าดั บแล วเลื อกค าข อมู ลสู งสุ ด
เนื่ องจากหากโมดู ล GP2D120 ตรวจจั บวั ตถุ ได ค าที่ อ านได จะเป นค าสู ง
A10.1 เป ดโปรแกรม Arduino IDE เขี ยนโปรแกรมภาษา C ตามโปรแกรมที่ A10-1
A10.2 จากนั้ นทํ าการคอมไพล แล วอั ปโหลดไปยั งหุ นยนต POP-BOT จากนั้ นป ดสวิ ตช ปลดสายดาวน โหลดออก
A10.3 ต อเซอร โวมอเตอร เข าที่ จุ ดต อเซอร โวมอเตอร Di 7 บนแผงวงจรควบคุ มของ POP-BOT
A10.4 วางวั ตถุ เป าหมาย ในกิ จกรรมนี้ เลื อกวางไว ที่ ตํ าแหน ง 67.5 องศา และห างจากหุ นยนต 15 ซม.