
Page 135 - ArduinoและPOP-BOT
P. 135
135
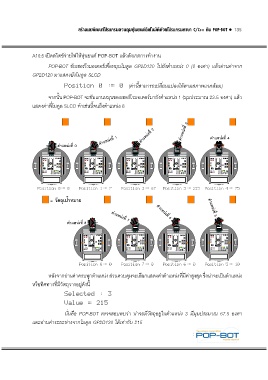
A10.5 เป ดสวิ ตช จ ายไฟให หุ นยนต POP-BOT แล วสั งเกตการทํ างาน
POP-BOT ขั บเซอร โวมอเตอร เพื่ อหมุ นโมดู ล GP2D120 ไปยั งตํ าแหน ง 0 (0 องศา) แล วอ านค าจาก
GP2D120 มาแสดงยั งโมดู ล SLCD
Position 0 := 0 (ค านี้ สามารถเปลี่ ยนแปลงได ตามสภาพแวดล อม)
จากนั้ น POP-BOT จะขั บแกนหมุ นของเซอร โวมอเตอร มายั งตํ าแหน ง 1 (มุ มประมาณ 22.5 องศา) แล ว
แสดงค าที่ โมดู ล SLCD ทํ าเช นนี้ จนถึ งตํ าแหน ง 8
RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- +
Distance=P8robCM Distance=P8robCM Distance=P8robCM Distance=P8robCM Distance=P8robCM
Position 0:= 0== Position 1:= 7== Position 2:= 67= Position 3:= 215 Position 4:= 75=
RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- + RAWoData=i307rR- +
Distance=P8robCM Distance=P8robCM Distance=P8robCM Distance=P8robCM
= == =
Position 8:= 0== Position 7:= 0= Position 6:= 0 Position 5:= 10
หลั งจากอ านค าครบทุ กตํ าแหน ง ส วนควบคุ มจะเลื อกแสดงค าตํ าแหน งที่ มี ค าสู งสุ ด ซึ่ งน าจะเป นตํ าแหน ง
หรื อทิ ศทางที่ มี วั ตถุ วางอยู ดั งนี้
Selected : 3
Value = 215
นั่ นคื อ POP-BOT ตรวจสอบพบว า น าจะมี วั ตถุ อยู ในตํ าแหน ง 3 มี มุ มประมาณ 67.5 องศา
และอ านค าระยะห างจากโมดู ล GP2D120 ได เท ากั บ 215