
Page 136 - ArduinoและPOP-BOT
P. 136
136
ในกิ จกรรมนี้ เป นการต อยอดจากกิ จกรรมที่ 10 หลั งจากที่ สามารถตรวจสอบแนวโน มทิ ศทางและตํ าแหน ง
ของวั ตถุ เป าหมายได แล ว ในกิ จกกรมนี้ จะเพิ่ มเติ มโปรแกรมเข าไปเพื่ อควบคุ มให หุ นยนต POP-BOT เคลื่ อนที่ เข า
หาวั ตถุ เป าหมาย โดยในที่ นี้ เลื อกใช ลู กบอลพลาสติ กแบบที่ ใช ห องบอลของสวนสนุ กในร ม หรื อใช ลู กเทนนิ สก็ ได
เมื่ อหุ นยนต POP-BOT ตรวจพบตํ าแหน งของลู กบอล จะเคลื่ อนที่ เข าหาและเมื่ อถึ งระยะใกล เพี ยงพอก็ จะขั บเสี ยง
เพื่ อแจ งการตรวจพบลู กบอลหรื อวั ตถุ
A11.1 ยั งคงใช หุ นยนต POP-BOTที่ ติ ดตั้ ง GP2D120 และเซอร โวมอเตอร จากกิ จกรรมที่ 10 ในการทดสอบ เป ด
โปรแกรม Arduino IDE เขี ยนโปรแกรมภาษา C ตามโปรแกรมที่ A11-1
A11.2 จากนั้ นทํ าการคอมไพล แล วอั ปโหลดไปยั งหุ นยนต POP-BOT จากนั้ นป ดสวิ ตช ปลดสายดาวน โหลดออก
A11.3 วางลู กบอลไว บนพื้ น ให ห างจากหุ นยนต POP-BOT 15 ซม.
A11.4 เป ดสวิ ตช จ ายไฟเลี้ ยงให หุ นยนต POP-BOT สั งเกตการทํ างาน
POP-BOT จะเริ่ มต นการทํ างานด วยการตรวจสอบตํ าแหน งและทิ ศทางของลู กบอลเหมื อนกั บกิ จกรตรมที่
10 แต คราวนี้ ไจะไม มี การแสดงค าที่ โมดู ล SLCD แล ว เมื่ ออ านค าครบทุ กตํ าแหน งแล ว ก็ จะประมวลผลเพื่ อเลื อก
ทิ ศทางที่ มี ค าตํ าแหน งสู งสุ ด แล วขั บมอเตอร ให หุ นยนต เคลื่ อนที่ ไปยั งทิ ศทางนั้ น
+
3
1
2
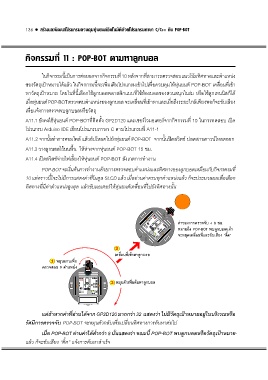
RAWoData=i307rR- +
Distance=P8robCM
แต ถ าหากค าที่ อ านได จาก GP2D120 มากกว า 32 แสดงว า ไม มี วั ตถุ เป าหมายอยู ในบริ เวณหรื อ
รั ศมี การตรวจจั บ POP-BOT จะหมุ นตั วกลั บเพื่ อเปลี่ ยนทิ ศทางการค นหาต อไป
เมื่ อ POP-BOT อ านค าได ตํ่ ากว า 8 นั่ นแสดงว า ขณะนี้ POP-BOT พบลู กบอลหรื อวั ตถุ เป าหมาย-
แล ว ก็ จะขั บเสี ยง “ติ้ ด” แจ งการค นหาสํ าเร็ จ