
Page 67 - ArduinoและPOP-BOT
P. 67
67
5.5.1 กํ าหนดค าทางฮาร ดแวร เพื่ อใช กั บโมดู ล POP-168
ในการใช งานโปรแกรม Arduino ครั้ งแรกจะต องกํ าหนดค าของฮาร ดแวร ที่ ใช งานร วมด วย ซึ่ งประกอบด วย
การเลื อกไมโครคอนโทรลเลอร ที่ ใช และเลื อกพอร ตอนุ กรมของคอมพิ วเตอร ที่ ต องการเชื่ อมต อ เมื่ อกํ าหนดค าแล ว ครั้ ง
ต อไปที่ เป ดโปรแกรมจะนํ าค าที่ กํ าหนดไว มาใช งานทั นที
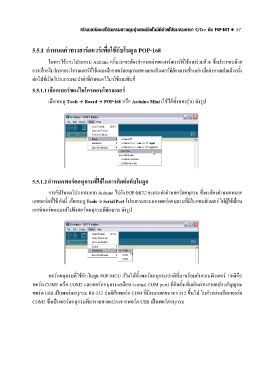
5.5.1.1 เลื อกเบอร ของไมโครคอนโทรลเลอร
เลื อกเมนู Tools Board POP-168 หรื อ Arduino Mini (ใช ได ทั้ งสองรุ น) ดั งรู ป
5.5.1.2 กํ าหนดพอร ตอนุ กรมที่ ใช ในการติ ดต อกั บโมดู ล
การอั ปโหลดโปรแกรมจาก Arduino ไปยั ง POP-MCU จะกระทํ าผ านพอร ตอนุ กรม ซึ่ งจะต องกํ าหนดหมาย
เลขพอร ตที่ ใช ดั งนี้ เลื อกเมนู Tools Serial Port โปรแกรมจะแสดงพอร ตอนุ กรมที่ มี ในคอมพิ วเตอร ให ผู ใช เลื่ อน
เคอร เซอร ของเมาส ไปยั งพอร ตอนุ กรมที่ ต องการ ดั งรู ป
พอร ตอนุ กรมที่ ใช กั บโมดู ล POP-MCU เป นได ทั้ งพอร ตอนุ กรมปกติ ที่ มาพร อมกั บคอมพิ วเตอร ปกติ คื อ
พอร ต COM1 หรื อ COM2 และพอร ตอนุ กรมเสมื อน (virtual COM port) ที่ ติ ดตั้ งเพิ่ มเติ มผ านสายแปลงสั ญญาณ
พอร ต USB เป นพอร ตอนุ กรม RS-232 ปกติ คื อพอร ต COM ที่ มี หมายเลขมากกว า 2 ขึ้ นไป ในตั วอย างเลื อกพอร ต
COM3 ซึ่ งเป นพอร ตอนุ กรมที่ มาจากสายแปลงจากพอร ต USB เป นพอร ตอนุ กรม