
Page 124 - Mechatronics with Experiments
P. 124
10 2 10 2
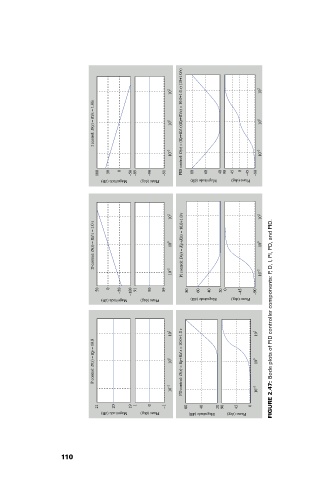
I control: D(s) = Ki/s = 1.0/s 10 0 PlD control: D(s) = (Kp+Kd s)(Kp+Ki/s) = 10.0+1.0 s) (10+1.0/s) 10 0
10 –2 10 –2
100 50 0 Magnitude (dB) –50 –89 –90 Phase (deg) –91 80 60 Magnitude (dB) 40 90 45 0 –45 Phase (deg) –90
10 2 10 2 PID.
D control: D(s) = Kd s = 1.0 s 10 0 Pl control: D(s) = Kp+Ki/s = 10.0+1.0/s 10 0 and PD, PI,
10 –2 10 –2 I, D, P ,
components:
–100
50 0 –50 91 90 89 80 60 40 20 0
–90
–45
Phase (deg)
Magnitude (dB)
Phase (deg)
Magnitude (dB)
controller
10 2 10 2 PID
P control: D(s) = Kp = 10.0 10 0 PD control: D(s) = Kp+Kd s = 10.0+1.0 s 10 0 of plots Bode
10 –2 10 –2 2.47:
FIGURE
21 20 19 1 0 –1 60 40 20 90 45 0
Phase (deg)
Magnitude (dB)
Magnitude (dB)
Phase (deg)
110