
Page 126 - Mechatronics with Experiments
P. 126
112 MECHATRONICS
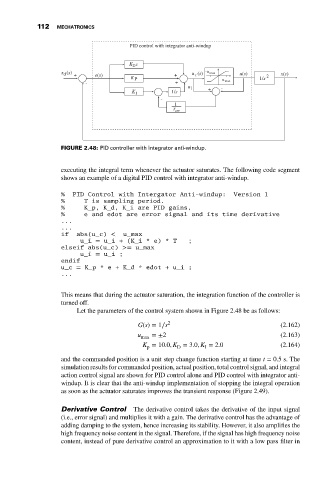
PID control with integrator anti-windup
K D S
x d (s) u c (s) -u max u(s) x(s)
+ e(s) + 2
K P u max 1/s
- +
u I + -
K I 1/S
-
1
T aw
FIGURE 2.48: PID controller with integrator anti-windup.
executing the integral term whenever the actuator saturates. The following code segment
shows an example of a digital PID control with integrator anti-windup.
% PID Control with Intergator Anti-windup: Version 1
% T is sampling period.
% K_p, K_d, K_i are PID gains,
% e and edot are error signal and its time derivative
...
...
if abs(u_c) < u_max
u_i = u_i + (K_i * e) * T ;
elseif abs(u_c) >= u_max
u_i = u_i ;
endif
u_c = K_p * e + K_d * edot + u_i ;
...
This means that during the actuator saturation, the integration function of the controller is
turned off.
Let the parameters of the control system shown in Figure 2.48 be as follows:
G(s) = 1∕s 2 (2.162)
u =±2 (2.163)
max
K = 10.0, K = 3.0, K = 2.0 (2.164)
p D I
and the commanded position is a unit step change function starting at time t = 0.5s.The
simulation results for commanded position, actual position, total control signal, and integral
action control signal are shown for PID control alone and PID control with integrator anti-
windup. It is clear that the anti-windup implementation of stopping the integral operation
as soon as the actuator saturates improves the transient response (Figure 2.49).
Derivative Control The derivative control takes the derivative of the input signal
(i.e., error signal) and multiplies it with a gain. The derivative control has the advantage of
adding damping to the system, hence increasing its stability. However, it also amplifies the
high frequency noise content in the signal. Therefore, if the signal has high frequency noise
content, instead of pure derivative control an approximation to it with a low pass filter in