
Page 127 - Mechatronics with Experiments
P. 127
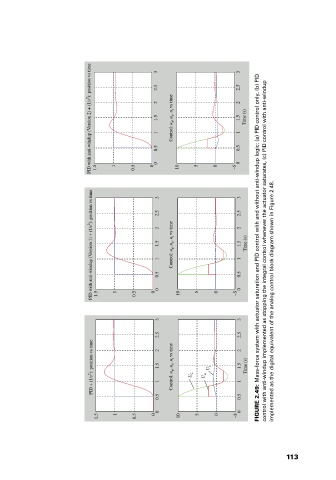
PID with anti-windup (Version 2) + (1/s 2 ): position vs time 1.5 1 0.5 0 0 3 2.5 2 1.5 1 0.5 Control: u a , u c , u i vs time 10 5 0 –5 0 3 2.5 2 1.5 1 0.5 Time (s) PID (b) only, control PID (a) logic: anti-windup anti-windup with control PID (c) saturates,
PID with anti-windup (Version 1) + (1/s 2 ): position vs time 3 2.5 2 1.5 1 0.5 Control: u a , u c , u i vs time 3 2.5 2 1.5 1 0.5 Time (s) without and with control PID and actuator the whenever control integral 2.48. Figure in shown diagram block
–5 0
0 0
0
10
5
1.5
1
0.5
actuator saturation the stopping control analog the
3 3 as of
with
2.5 2 2.5 2 system implemented equivalent
PID + (1/s 2 ): position vs time 1.5 1 Control: u a , u c , u i vs time U C U a U i 1.5 1 Time (s) Mass-force anti-windup digital the
0.5 0.5 2.49: with as
FIGURE implemented
0 0 control
1.5 1 0.5 10 5 0 –5 0
113